


Listar por autor "Sala Piqueras, Antonio"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por autor
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por autor "Sala Piqueras, Antonio"
Mostrando ítems 21-40 de 120
-
 Jaadari, Abdelhafidh (Universitat Politècnica de València, 2013-07-24)Esta tesis aborda el problema del análisis de estabilidad y diseño de control para sistemas no lineales expresados en forma de modelos Takagi-Sugeno de tiempo continuo. El análisis de estabilidad se basa, por lo general, ...
Jaadari, Abdelhafidh (Universitat Politècnica de València, 2013-07-24)Esta tesis aborda el problema del análisis de estabilidad y diseño de control para sistemas no lineales expresados en forma de modelos Takagi-Sugeno de tiempo continuo. El análisis de estabilidad se basa, por lo general, ... -
 González Germán, Iván Temoatzin (Universitat Politècnica de València, 2018-05-04)Esta tesis considera un enfoque basado en Lyapunov para el análisis y control de sistemas no lineales cuyas ecuaciones dinámicas son reescritas como un modelo Takagi-Sugeno o uno polinomial convexo. Estas estructuras ...
González Germán, Iván Temoatzin (Universitat Politècnica de València, 2018-05-04)Esta tesis considera un enfoque basado en Lyapunov para el análisis y control de sistemas no lineales cuyas ecuaciones dinámicas son reescritas como un modelo Takagi-Sugeno o uno polinomial convexo. Estas estructuras ... -
 Pitarch Pérez, José Luis (Universitat Politècnica de València, 2014-01-07)The present thesis employs fuzzy-polynomial control techniques in order to improve the stability analysis and control of nonlinear systems. Initially, it reviews the more extended techniques in the field of Takagi-Sugeno ...
Pitarch Pérez, José Luis (Universitat Politècnica de València, 2014-01-07)The present thesis employs fuzzy-polynomial control techniques in order to improve the stability analysis and control of nonlinear systems. Initially, it reviews the more extended techniques in the field of Takagi-Sugeno ... -
 Robles Ruiz, Ruben (Universitat Politècnica de València, 2018-04-23)Esta tesis discute diferentes metodologías de modelado para extraer mejores prestaciones o resultados de estabilidad que aquéllas que el modelado convencional basado en sector no-lineal de sistemas Takagi-Sugeno (también ...
Robles Ruiz, Ruben (Universitat Politècnica de València, 2018-04-23)Esta tesis discute diferentes metodologías de modelado para extraer mejores prestaciones o resultados de estabilidad que aquéllas que el modelado convencional basado en sector no-lineal de sistemas Takagi-Sugeno (también ... -
 Blasco Aucejo, Juan (Universitat Politècnica de València, 2013-07-24)Consulta en la Biblioteca de la ETSI Industriales (8580)
Blasco Aucejo, Juan (Universitat Politècnica de València, 2013-07-24)Consulta en la Biblioteca de la ETSI Industriales (8580) -
 Diez Ruano, José Luís; Navarro Herrero, José Luís; Sala Piqueras, Antonio (Universitat Politècnica de València, 2010-10-01)[ES] En este artículo se presentan los tipos de modelos borrosos y metodologías de identificación (por agrupamiento borroso) más adecuados para obtener modelos locales de sistemas no lineales. En particular, se muestra qué ...
Diez Ruano, José Luís; Navarro Herrero, José Luís; Sala Piqueras, Antonio (Universitat Politècnica de València, 2010-10-01)[ES] En este artículo se presentan los tipos de modelos borrosos y metodologías de identificación (por agrupamiento borroso) más adecuados para obtener modelos locales de sistemas no lineales. En particular, se muestra qué ... -
 Sala Piqueras, Antonio (Universitat Politècnica de València, 2018-02-14)Este objeto de aprendizaje motiva el concepto de realimentación del estado (plena información) versus realimentación de la salida o control robusto (que no son objetivo de este vídeo). Discute por qué no es necesaria ...
Sala Piqueras, Antonio (Universitat Politècnica de València, 2018-02-14)Este objeto de aprendizaje motiva el concepto de realimentación del estado (plena información) versus realimentación de la salida o control robusto (que no son objetivo de este vídeo). Discute por qué no es necesaria ... -
 Hernández Mejías, Manuel Alejandro (Universitat Politècnica de València, 2016-09-01)[EN] In this thesis, invariant-set theory is used to study the stability and feasibility of constrained scenario-based predictive controllers for Markov-jump linear systems. In the underlying optimisation problem of the ...
Hernández Mejías, Manuel Alejandro (Universitat Politècnica de València, 2016-09-01)[EN] In this thesis, invariant-set theory is used to study the stability and feasibility of constrained scenario-based predictive controllers for Markov-jump linear systems. In the underlying optimisation problem of the ... -
 González, Antonio; Sala, Antonio (Elsevier, 2014-04)[ES] Los controladores basados en predictor, en particular los obtenidos por métodos de asignación finita de espectro (también conocido como método de reducción), permiten abordar el control por realimentación del estado ...
González, Antonio; Sala, Antonio (Elsevier, 2014-04)[ES] Los controladores basados en predictor, en particular los obtenidos por métodos de asignación finita de espectro (también conocido como método de reducción), permiten abordar el control por realimentación del estado ... -
 Pitarch Pérez, José Luis; Sala Piqueras, Antonio; Lauber, J.; Guerra, T. M. (Taylor & Francis, 2016-04-03)This paper presents a discrete-time control design methodology for input-saturating systems using a Lyapunov function with dependence on present and past states. The approach is used to bypass the usual difficulty with ...
Pitarch Pérez, José Luis; Sala Piqueras, Antonio; Lauber, J.; Guerra, T. M. (Taylor & Francis, 2016-04-03)This paper presents a discrete-time control design methodology for input-saturating systems using a Lyapunov function with dependence on present and past states. The approach is used to bypass the usual difficulty with ... -
Pitarch Pérez, José Luis (Universitat Politècnica de València, 2011-11-10)Este trabajo trata una forma de control de sistemas no lineales intermedia entre el control lineal puro y el control totalmente no lineal, utilizando modelos borrosos para encuadrar las no linealidades entre varios sistemas ...
-
 González Sorribes, Antonio (Universitat Politècnica de València, 2012-03-02)Los sistemas con retardos temporales aparecen frecuentemente en aplicaciones prácticas de control de procesos. Éstos deben ser considerados en el análisis y diseño de los controladores, ya que de no ser tenidos en cuenta, ...
González Sorribes, Antonio (Universitat Politècnica de València, 2012-03-02)Los sistemas con retardos temporales aparecen frecuentemente en aplicaciones prácticas de control de procesos. Éstos deben ser considerados en el análisis y diseño de los controladores, ya que de no ser tenidos en cuenta, ... -
 Sala Piqueras, Antonio (Universitat Politècnica de València, 2020-02-14)Este vídeo presenta ejemplos Matlab del criterio de Nyquist usado para determinar la estabilidad en bucle cerrado de distintas configuraciones de procesos estables en bucle abierto y reguladores PD. Sólo debe comprobarse ...
Sala Piqueras, Antonio (Universitat Politècnica de València, 2020-02-14)Este vídeo presenta ejemplos Matlab del criterio de Nyquist usado para determinar la estabilidad en bucle cerrado de distintas configuraciones de procesos estables en bucle abierto y reguladores PD. Sólo debe comprobarse ... -
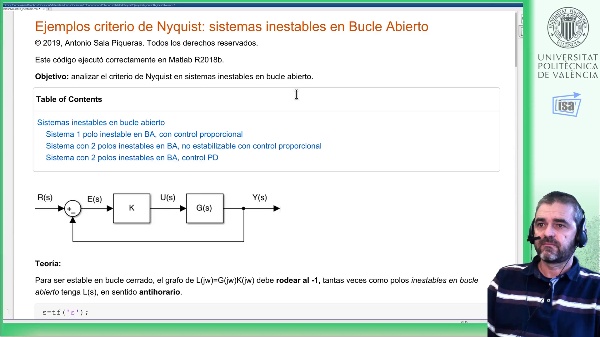 Sala Piqueras, Antonio (Universitat Politècnica de València, 2020-02-14)Este vídeo aborda el criterio de Nyquist para el caso donde se desee comprobar si determinados controladores son capaces de estabilizar en bucle cerrado a un proceso inestable en bucle abierto. En este caso, ya se debe ...
Sala Piqueras, Antonio (Universitat Politècnica de València, 2020-02-14)Este vídeo aborda el criterio de Nyquist para el caso donde se desee comprobar si determinados controladores son capaces de estabilizar en bucle cerrado a un proceso inestable en bucle abierto. En este caso, ya se debe ... -
 González Sorribes, Antonio; Sala, Antonio; Armesto, Leopoldo (De Gruyter Open Sp. z o.o., 2022-09-01)[EN] An output-feedback decentralised formation control strategy is pursued under pole-region constraints, assuming that the agents have access to relative position measurements with respect to a set of neighbors in a graph ...
González Sorribes, Antonio; Sala, Antonio; Armesto, Leopoldo (De Gruyter Open Sp. z o.o., 2022-09-01)[EN] An output-feedback decentralised formation control strategy is pursued under pole-region constraints, assuming that the agents have access to relative position measurements with respect to a set of neighbors in a graph ... -
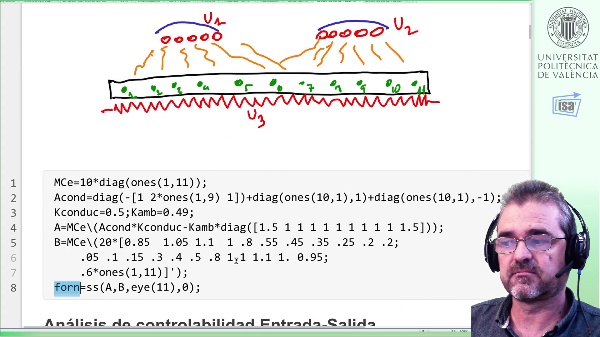 Sala Piqueras, Antonio (2021-06-09)Este vídeo desarrolla el diseño del control por desacoplamiento SVD de un modelo de horno lineal. Se dedica hasta el minuto [02:50] a revisar el modelado y controlabilidad entrada/salida de forma rápida. Se sintonizan ...
Sala Piqueras, Antonio (2021-06-09)Este vídeo desarrolla el diseño del control por desacoplamiento SVD de un modelo de horno lineal. Se dedica hasta el minuto [02:50] a revisar el modelado y controlabilidad entrada/salida de forma rápida. Se sintonizan ... -
García Cavero, Javier (Universitat Politècnica de València, 2018-04-13)[ES] Este trabajo está enfocado al control avanzado de microrredes que funcionan con corriente continua. Para realizar dicho control, se han realizado tanto el modelado de una red formada por inversores como el diseño ...
-
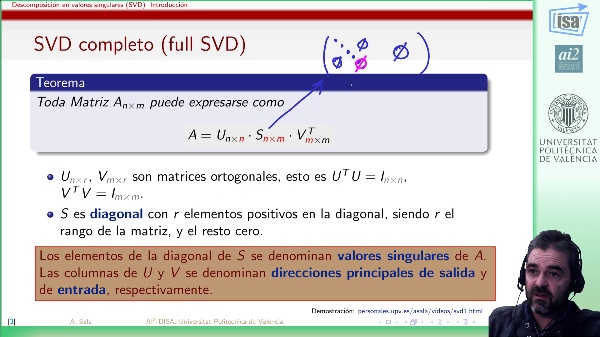 Sala Piqueras, Antonio (Universitat Politècnica de València, 2017-03-13)Introducción (sin demostración) a la descomposición en valores singulares (SVD). Interpretación geométrica (rotación-escalado-rotación), aplicaciones a rango de matrices numéricas, inversa y pseudoinversa.
Sala Piqueras, Antonio (Universitat Politècnica de València, 2017-03-13)Introducción (sin demostración) a la descomposición en valores singulares (SVD). Interpretación geométrica (rotación-escalado-rotación), aplicaciones a rango de matrices numéricas, inversa y pseudoinversa. -
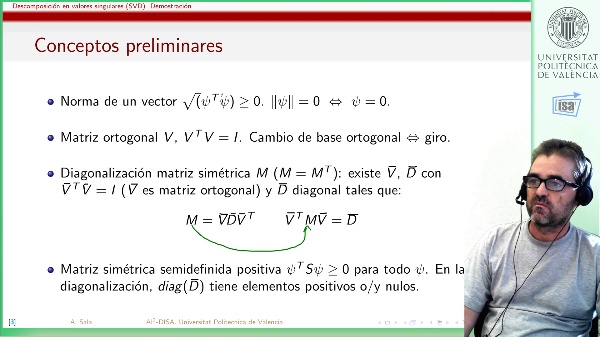 Sala Piqueras, Antonio (Universitat Politècnica de València, 2017-11-28)Este video enuncia el teorema de descomposición en valores singulares de una matriz real, en versión "económica" y desarrolla su demostración. Al final, como corolario, se propone la descomposición "completa".
Sala Piqueras, Antonio (Universitat Politècnica de València, 2017-11-28)Este video enuncia el teorema de descomposición en valores singulares de una matriz real, en versión "económica" y desarrolla su demostración. Al final, como corolario, se propone la descomposición "completa". -
 Ramírez Valenzuela, Julio César (Universitat Politècnica de València, 2008-05-07)Esta tesis aborda el diagnóstico de fallos en sistemas industriales por técnicas de Inteligencia Artificial, tratando en particular el razonamiento borroso y posibilístico. Inicialmente, se presentan los problemas a resolver ...
Ramírez Valenzuela, Julio César (Universitat Politècnica de València, 2008-05-07)Esta tesis aborda el diagnóstico de fallos en sistemas industriales por técnicas de Inteligencia Artificial, tratando en particular el razonamiento borroso y posibilístico. Inicialmente, se presentan los problemas a resolver ...
Mostrando ítems 21-40 de 120

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
