


Listar por autor "Mellado Arteche, Martín"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por autor
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por autor "Mellado Arteche, Martín"
Mostrando ítems 41-60 de 72
-
 Cortes-Lopez, Victoria; Blanes Campos, Carlos; Blasco Ivars, José; Ortiz Sánchez, María Coral; Aleixos Borrás, María Nuria; Mellado Arteche, Martín; Cubero García, Sergio; Talens Oliag, Pau (Elsevier, 2017)[EN] Development of non-destructive tools for determining mango ripeness would improve the quality of industrial production of the postharvest processes. This study addresses the creation of a new sensor that combines ...
Cortes-Lopez, Victoria; Blanes Campos, Carlos; Blasco Ivars, José; Ortiz Sánchez, María Coral; Aleixos Borrás, María Nuria; Mellado Arteche, Martín; Cubero García, Sergio; Talens Oliag, Pau (Elsevier, 2017)[EN] Development of non-destructive tools for determining mango ripeness would improve the quality of industrial production of the postharvest processes. This study addresses the creation of a new sensor that combines ... -
 Mellado Arteche, Martín (Universitat Politècnica de València, 2015-10-28)[EN] The efficiency of free-collision motion planning results very sensible on robot and obstacle modelling technique selected. In this way, many works have been oriented to define models with proper throughput to speed ...
Mellado Arteche, Martín (Universitat Politècnica de València, 2015-10-28)[EN] The efficiency of free-collision motion planning results very sensible on robot and obstacle modelling technique selected. In this way, many works have been oriented to define models with proper throughput to speed ... -
 Skrzypczyk, Krzysztof; Mellado Arteche, Martín (Springer, 2013)An efficiency of an multi-robot systems depends on proper coordinating tasks of all robots. This paper presents a game theoretic approach to modelling and solving the pick-up and collection problem. The classical form of ...
Skrzypczyk, Krzysztof; Mellado Arteche, Martín (Springer, 2013)An efficiency of an multi-robot systems depends on proper coordinating tasks of all robots. This paper presents a game theoretic approach to modelling and solving the pick-up and collection problem. The classical form of ... -
 Mellado Arteche, Martín (Universitat Politècnica de València, 2009-06-12)Este vídeo didáctico como objeto de aprendizaje digital presenta y justifica porqué existen múltiples soluciones en el problema cinemático inverso de robots y las muestra para el caso de robots SCARA y angulares.
Mellado Arteche, Martín (Universitat Politècnica de València, 2009-06-12)Este vídeo didáctico como objeto de aprendizaje digital presenta y justifica porqué existen múltiples soluciones en el problema cinemático inverso de robots y las muestra para el caso de robots SCARA y angulares. -
 Blanes Campos, Carlos; Cortés López, Victoria; Ortiz Sánchez, María Coral; Mellado Arteche, Martín; Talens Oliag, Pau (Springer Verlag (Germany), 2015-09)[EN] The objective of the study was to evaluate the use of a robot gripper in the assessment of mango (cv. BOsteen^) firmness as well as to establish relationships between the nondestructive robot gripper measurements ...
Blanes Campos, Carlos; Cortés López, Victoria; Ortiz Sánchez, María Coral; Mellado Arteche, Martín; Talens Oliag, Pau (Springer Verlag (Germany), 2015-09)[EN] The objective of the study was to evaluate the use of a robot gripper in the assessment of mango (cv. BOsteen^) firmness as well as to establish relationships between the nondestructive robot gripper measurements ... -
 Moreno Ceca, Jesús (Universitat Politècnica de València, 2014-02-17)[ES] Para conocer en profundidad el contacto entre los dedos de las garras de un robot y los productos manipulados, con el desarrollo de esta tesina se pretende acoplar pieles artificiales en las zonas de contacto. La ...
Moreno Ceca, Jesús (Universitat Politècnica de València, 2014-02-17)[ES] Para conocer en profundidad el contacto entre los dedos de las garras de un robot y los productos manipulados, con el desarrollo de esta tesina se pretende acoplar pieles artificiales en las zonas de contacto. La ... -
 Vendrell Vidal, Eduardo (Universitat Politècnica de València, 2015-09-23)En el trabajo de tesis se aborda la planificación y replanificación de las actividades que lleva a cabo un robot en un entorno dinámico. De un lado, se plantea una metodología de planificación que considera una descomposición ...
Vendrell Vidal, Eduardo (Universitat Politècnica de València, 2015-09-23)En el trabajo de tesis se aborda la planificación y replanificación de las actividades que lleva a cabo un robot en un entorno dinámico. De un lado, se plantea una metodología de planificación que considera una descomposición ... -
 Valera Martínez, Alfonso (Universitat Politècnica de València, 2017-09-04)[EN] The following document will discuss the Final Master's Work done during the Master's Degree in Automatic and Industrial Computer Science. The design of a prototype wireless modular clamp, the programming of the ...
Valera Martínez, Alfonso (Universitat Politècnica de València, 2017-09-04)[EN] The following document will discuss the Final Master's Work done during the Master's Degree in Automatic and Industrial Computer Science. The design of a prototype wireless modular clamp, the programming of the ... -
 Fernández-Cañada Vilata, Ángel (Universitat Politècnica de València, 2012-09-18)En la actualidad vivimos una revolución tecnológica ocasionada por la aparición de nuevos dispositivos móviles de gran potencia. Es inevitable que nos veamos tentados de combinar este mundo con el otro campo y futuro ...
Fernández-Cañada Vilata, Ángel (Universitat Politècnica de València, 2012-09-18)En la actualidad vivimos una revolución tecnológica ocasionada por la aparición de nuevos dispositivos móviles de gran potencia. Es inevitable que nos veamos tentados de combinar este mundo con el otro campo y futuro ... -
 Blanes Campos, Carlos; Mellado Arteche, Martín; Ortiz Sánchez, María Coral; Valera Fernández, Ángel (Instituto Nacional de Investigación y Tecnología Agraria y Alimentaria (INIA), 2011)[EN] Robotics has been introduced in industry to replace humans in arduous and repetitive tasks, to reduce labour costs and to ensure consistent quality control of the process. Nowadays robots are cheaper, can work in ...
Blanes Campos, Carlos; Mellado Arteche, Martín; Ortiz Sánchez, María Coral; Valera Fernández, Ángel (Instituto Nacional de Investigación y Tecnología Agraria y Alimentaria (INIA), 2011)[EN] Robotics has been introduced in industry to replace humans in arduous and repetitive tasks, to reduce labour costs and to ensure consistent quality control of the process. Nowadays robots are cheaper, can work in ... -
 Mellado Arteche, Martín (Universitat Politècnica de València, 2017-06-05)El vídeo explica la técnica básica de resolución del problema de autolocalización de un robot móvil
Mellado Arteche, Martín (Universitat Politècnica de València, 2017-06-05)El vídeo explica la técnica básica de resolución del problema de autolocalización de un robot móvil -
 Mellado Arteche, Martín (Universitat Politècnica de València, 2017-06-05)El vídeo explica la resolución de la cinemática directa para un robot móvil de configuración diferencial
Mellado Arteche, Martín (Universitat Politècnica de València, 2017-06-05)El vídeo explica la resolución de la cinemática directa para un robot móvil de configuración diferencial -
 Mellado Arteche, Martín (Universitat Politècnica de València, 2017-06-05)El vídeo muestra el planteamiento de resolución de la cinemática para robots móviles de configuración triciclo y ackermann
Mellado Arteche, Martín (Universitat Politècnica de València, 2017-06-05)El vídeo muestra el planteamiento de resolución de la cinemática para robots móviles de configuración triciclo y ackermann -
 Mellado Arteche, Martín (Universitat Politècnica de València, 2017-06-16)El vídeo explica el planteamiento de resolución general para el problema de la cinemática directa de un robot móvil
Mellado Arteche, Martín (Universitat Politècnica de València, 2017-06-16)El vídeo explica el planteamiento de resolución general para el problema de la cinemática directa de un robot móvil -
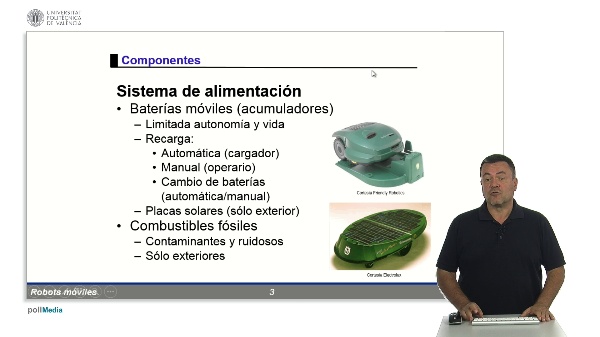 Mellado Arteche, Martín (Universitat Politècnica de València, 2017-06-01)El vídeo comenta los sistemas de alimentación y control como componentes de un robot móvil
Mellado Arteche, Martín (Universitat Politècnica de València, 2017-06-01)El vídeo comenta los sistemas de alimentación y control como componentes de un robot móvil -
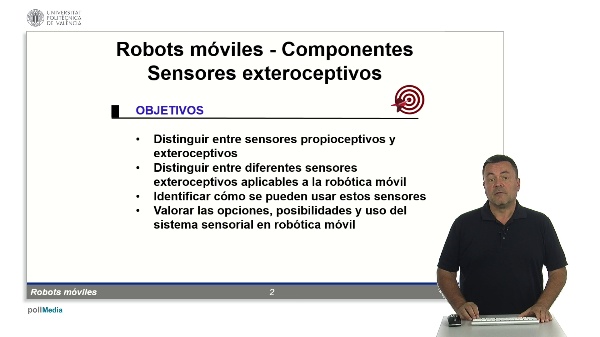 Mellado Arteche, Martín (Universitat Politècnica de València, 2017-06-05)El vídeo comenta el sistema sensorial exteroceptivo como componente de un robot móvil
Mellado Arteche, Martín (Universitat Politècnica de València, 2017-06-05)El vídeo comenta el sistema sensorial exteroceptivo como componente de un robot móvil -
 Mellado Arteche, Martín (Universitat Politècnica de València, 2017-06-01)El vídeo presenta los antecedentes de la robótica móvil
Mellado Arteche, Martín (Universitat Politècnica de València, 2017-06-01)El vídeo presenta los antecedentes de la robótica móvil -
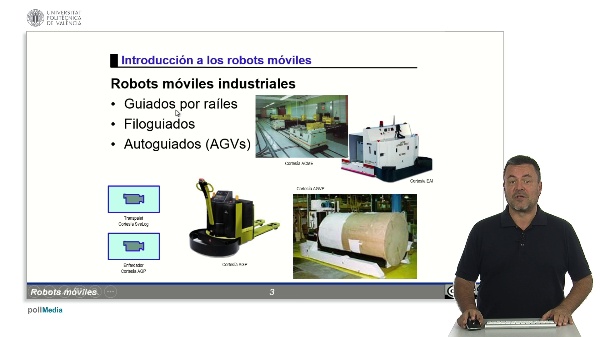 Mellado Arteche, Martín (Universitat Politècnica de València, 2017-06-01)El vídeo muestra posibles aplicaciones de robots móviles
Mellado Arteche, Martín (Universitat Politècnica de València, 2017-06-01)El vídeo muestra posibles aplicaciones de robots móviles -
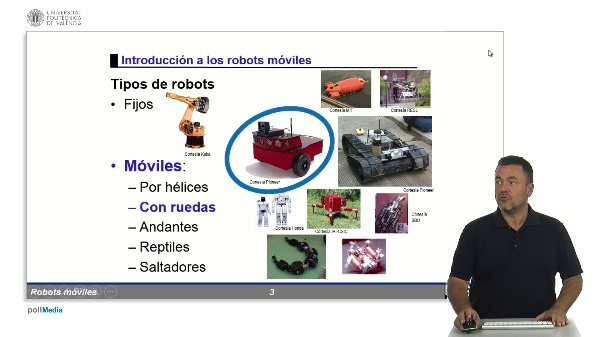
 Mellado Arteche, Martín (Universitat Politècnica de València, 2017-06-01)El vídeo muestra las características básicas de los robots móviles
Mellado Arteche, Martín (Universitat Politècnica de València, 2017-06-01)El vídeo muestra las características básicas de los robots móviles -
 Mellado Arteche, Martín (Universitat Politècnica de València, 2017-06-05)En el vídeo se explican diferentes comportamientos para programar en un robot móvil
Mellado Arteche, Martín (Universitat Politècnica de València, 2017-06-05)En el vídeo se explican diferentes comportamientos para programar en un robot móvil
Mostrando ítems 41-60 de 72

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
