


Listar por autor "Salt Llobregat, Julián José"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por autor
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por autor "Salt Llobregat, Julián José"
Mostrando ítems 1-20 de 48
-
 Cuenca Lacruz, Ángel Miguel; Salt Llobregat, Julián José; Sala Piqueras, Antonio; Pizá Fernández, Ricardo (Institute of Electrical and Electronics Engineers (IEEE), 2011-02)n this paper, a methodology to design controllers able to cope with different load conditions on an Ethernet network is introduced. Load conditions induce time-varying delays between measurements and control. To face these ...
Cuenca Lacruz, Ángel Miguel; Salt Llobregat, Julián José; Sala Piqueras, Antonio; Pizá Fernández, Ricardo (Institute of Electrical and Electronics Engineers (IEEE), 2011-02)n this paper, a methodology to design controllers able to cope with different load conditions on an Ethernet network is introduced. Load conditions induce time-varying delays between measurements and control. To face these ... -
 Salt Llobregat, Julián José; Cuenca Lacruz, Ángel Miguel; Palau, Francisco; Dormido, Sebastian (MDPI, 2014-03)[EN] In many control applications, the sensor technology used for the measurement of the variable to be controlled is not able to maintain a restricted sampling period. In this context, the assumption of regular and uniform ...
Salt Llobregat, Julián José; Cuenca Lacruz, Ángel Miguel; Palau, Francisco; Dormido, Sebastian (MDPI, 2014-03)[EN] In many control applications, the sensor technology used for the measurement of the variable to be controlled is not able to maintain a restricted sampling period. In this context, the assumption of regular and uniform ... -
 Salt Llobregat, Julián José; Sala Piqueras, Antonio (Elsevier, 2014-12-01)This paper addresses an easy computation of the multiple components of the response to a sinusoidal input of a dual-rate linear time-invariant discrete system from the Bode diagram of LTI systems arising from a lifted ...
Salt Llobregat, Julián José; Sala Piqueras, Antonio (Elsevier, 2014-12-01)This paper addresses an easy computation of the multiple components of the response to a sinusoidal input of a dual-rate linear time-invariant discrete system from the Bode diagram of LTI systems arising from a lifted ... -
 Cuenca Lacruz, Ángel Miguel; Ojha, Unnati; Salt Llobregat, Julián José; Chow, Mo-Yuen (Elsevier, 2015-05-10)[EN] In this work, a non-uniform multi-rate control strategy is applied to a kind of Networked Control System (NCS) where a wireless path tracking control for an Unmanned Ground Vehicle (UGV) is carried out. The main aims ...
Cuenca Lacruz, Ángel Miguel; Ojha, Unnati; Salt Llobregat, Julián José; Chow, Mo-Yuen (Elsevier, 2015-05-10)[EN] In this work, a non-uniform multi-rate control strategy is applied to a kind of Networked Control System (NCS) where a wireless path tracking control for an Unmanned Ground Vehicle (UGV) is carried out. The main aims ... -
 Cuenca Lacruz, Ángel Miguel; García Gil, Pedro José; Albertos Pérez, Pedro; Salt Llobregat, Julián José (Springer Verlag (Germany), 2011-12)This paper presents a Non-Uniform Predictor-Observer (NUPO) based control approach in order to deal with two of the main problems related to Networked Control Systems (NCS) or Sensor Networks (SN): time-varying delays and ...
Cuenca Lacruz, Ángel Miguel; García Gil, Pedro José; Albertos Pérez, Pedro; Salt Llobregat, Julián José (Springer Verlag (Germany), 2011-12)This paper presents a Non-Uniform Predictor-Observer (NUPO) based control approach in order to deal with two of the main problems related to Networked Control Systems (NCS) or Sensor Networks (SN): time-varying delays and ... -
 Cuenca, Ángel; Alcaina-Acosta, José Joaquín; Salt Llobregat, Julián José; Casanova Calvo, Vicente; Pizá, Ricardo (Elsevier, 2018-05)[EN] This paper introduces a packet-based dual-rate control strategy to face time-varying network-induced delays, packet dropouts and packet disorder in a Networked Control System. Slow-rate sensing enables to achieve ...
Cuenca, Ángel; Alcaina-Acosta, José Joaquín; Salt Llobregat, Julián José; Casanova Calvo, Vicente; Pizá, Ricardo (Elsevier, 2018-05)[EN] This paper introduces a packet-based dual-rate control strategy to face time-varying network-induced delays, packet dropouts and packet disorder in a Networked Control System. Slow-rate sensing enables to achieve ... -
 Baños, Alfonso; Salt Llobregat, Julián José; Casanova Calvo, Vicente (John Wiley & Sons, 2022-01-25)[EN] A dual-rate control system is a hybrid system composed of continuous-time and discrete-time elements with two sampling frequencies. In this work, a new frequency domain analysis and design approach, based on the ...
Baños, Alfonso; Salt Llobregat, Julián José; Casanova Calvo, Vicente (John Wiley & Sons, 2022-01-25)[EN] A dual-rate control system is a hybrid system composed of continuous-time and discrete-time elements with two sampling frequencies. In this work, a new frequency domain analysis and design approach, based on the ... -
 Cuenca, Ángel; Zhan, Wei; Salt Llobregat, Julián José; Alcaina-Acosta, José Joaquín; Tang, Chen; Tomizuka, Masayoshi (MDPI AG, 2019-07-01)[EN] This work presents a novel remote control solution for an Autonomous Vehicle (AV), where the system structure is split into two sides. Both sides are assumed to be synchronized and linked through a communication ...
Cuenca, Ángel; Zhan, Wei; Salt Llobregat, Julián José; Alcaina-Acosta, José Joaquín; Tang, Chen; Tomizuka, Masayoshi (MDPI AG, 2019-07-01)[EN] This work presents a novel remote control solution for an Autonomous Vehicle (AV), where the system structure is split into two sides. Both sides are assumed to be synchronized and linked through a communication ... -
 Salt Llobregat, Julián José; Sala, Antonio; Albertos Pérez, Pedro (Institute of Electrical and Electronics Engineers (IEEE), 2011-09)An algebraic design via Diophantine equations of dual-rate regulators for linear unstable and non-minimum-phase plants, generalizing the well-known constraints for the reference model in single-rate systems, is presented ...
Salt Llobregat, Julián José; Sala, Antonio; Albertos Pérez, Pedro (Institute of Electrical and Electronics Engineers (IEEE), 2011-09)An algebraic design via Diophantine equations of dual-rate regulators for linear unstable and non-minimum-phase plants, generalizing the well-known constraints for the reference model in single-rate systems, is presented ... -
 Salt Ducajú, Julián M.; Salt Llobregat, Julián José; Cuenca, Ángel; Tomizuka, Masayoshi (MDPI AG, 2021-02-23)[EN] In this contribution, we suggest two proposals to achieve fast, real-time lane-keeping control for Autonomous Ground Vehicles (AGVs). The goal of lane-keeping is to orient and keep the vehicle within a given reference ...
Salt Ducajú, Julián M.; Salt Llobregat, Julián José; Cuenca, Ángel; Tomizuka, Masayoshi (MDPI AG, 2021-02-23)[EN] In this contribution, we suggest two proposals to achieve fast, real-time lane-keeping control for Autonomous Ground Vehicles (AGVs). The goal of lane-keeping is to orient and keep the vehicle within a given reference ... -
 Lledó Molina, Enrique Vicente (Universitat Politècnica de València, 2018-09-21)[ES] En el presente proyecto se desarrollar´a el control basado en red de un robot m´ovil de bajo coste mediante t´ecnicas multifrecuencia. El robot m´ovil, se ha elaborado para ser una plataforma de laboratorio para el ...
Lledó Molina, Enrique Vicente (Universitat Politècnica de València, 2018-09-21)[ES] En el presente proyecto se desarrollar´a el control basado en red de un robot m´ovil de bajo coste mediante t´ecnicas multifrecuencia. El robot m´ovil, se ha elaborado para ser una plataforma de laboratorio para el ... -
 Lorente Peris, Juan Manuel (Universitat Politècnica de València, 2017-01-02)[EN] In this project a control algorithm for a quadrirotor flight stabilization. The differents angles will be controlled by means of a PID controller attending diferent reference conditions. The control orders will be ...
Lorente Peris, Juan Manuel (Universitat Politècnica de València, 2017-01-02)[EN] In this project a control algorithm for a quadrirotor flight stabilization. The differents angles will be controlled by means of a PID controller attending diferent reference conditions. The control orders will be ... -
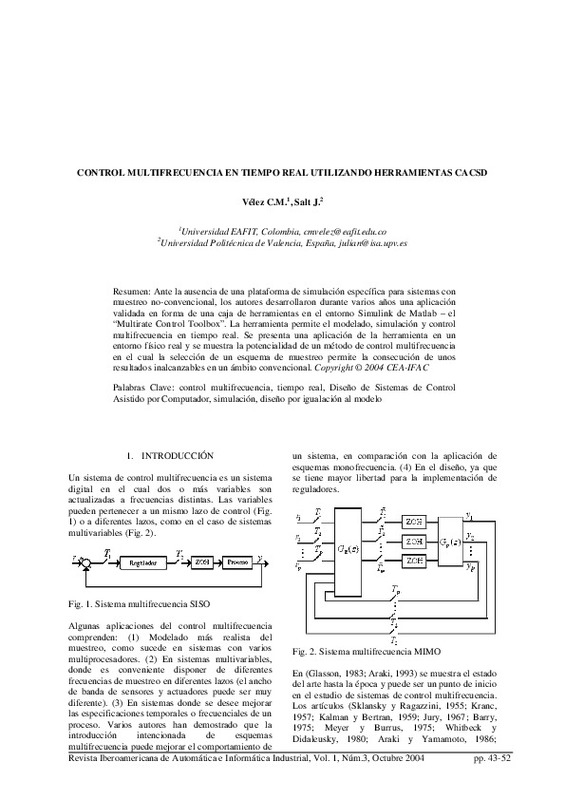 Vélez, C. M.; Salt Llobregat, Julián José (Universitat Politècnica de València, 2010-10-01)[ES] Ante la ausencia de una plataforma de simulación específica para sistemas con muestreo no-convencional, los autores desarrollaron durante varios años una aplicación validada en forma de una caja de herramientas en el ...
Vélez, C. M.; Salt Llobregat, Julián José (Universitat Politècnica de València, 2010-10-01)[ES] Ante la ausencia de una plataforma de simulación específica para sistemas con muestreo no-convencional, los autores desarrollaron durante varios años una aplicación validada en forma de una caja de herramientas en el ... -
 Casanova Calvo, Vicente; Alcaina-Acosta, José Joaquín; Salt Llobregat, Julián José; Pizá, R.; Cuenca Lacruz, Ángel Miguel (Elsevier, 2016)[EN] This paper deals with the real implementation of an event-based control structure for the classical rotary inverted pendulum. The communication between controller and plant is performed through Ethernet (TCP/IP) which ...
Casanova Calvo, Vicente; Alcaina-Acosta, José Joaquín; Salt Llobregat, Julián José; Pizá, R.; Cuenca Lacruz, Ángel Miguel (Elsevier, 2016)[EN] This paper deals with the real implementation of an event-based control structure for the classical rotary inverted pendulum. The communication between controller and plant is performed through Ethernet (TCP/IP) which ... -
Vila Collantes, Carlos (Universitat Politècnica de València, 2022-11-24)[ES] En este trabajo se modela un automóvil y se diseña el control de su dirección para el correcto seguimiento de un circuito de pruebas considerando diferentes velocidades. Se considera la metodología QFT (Quantitative ...
-
 Carbonell Lázaro, Rafael (Universitat Politècnica de València, 2019-11-06)[ES] Este trabajo final de máster tiene como objetivo controlar un dron mediante técnicas de bifrecuencia en orientación. El bucle de control se compone básicamente de tres tareas: medición, cálculo de control y actuación. ...
Carbonell Lázaro, Rafael (Universitat Politècnica de València, 2019-11-06)[ES] Este trabajo final de máster tiene como objetivo controlar un dron mediante técnicas de bifrecuencia en orientación. El bucle de control se compone básicamente de tres tareas: medición, cálculo de control y actuación. ... -
 González Sorribes, Antonio; Carbonell-Lázaro, Rafael; Cuenca, Ángel; Salt Llobregat, Julián José (Institute of Electrical and Electronics Engineers, 2024)[EN] This paper presents a new control synthesis methodology for nonholonomic mobile robots subjected to time-varying delays and input saturation constraints. The proposed control method is based on smooth static nonlinear ...
González Sorribes, Antonio; Carbonell-Lázaro, Rafael; Cuenca, Ángel; Salt Llobregat, Julián José (Institute of Electrical and Electronics Engineers, 2024)[EN] This paper presents a new control synthesis methodology for nonholonomic mobile robots subjected to time-varying delays and input saturation constraints. The proposed control method is based on smooth static nonlinear ... -
Casanova Calvo, Vicente; Salt Llobregat, Julián José; Pizá Fernández, Ricardo; Cuenca Lacruz, Ángel Miguel (Agora University Editing House, 2012-03)[EN] The aim of this work is the development and implementation of a control structure for the double rotary inverted pendulum, suitable to be used in a Networked Control System environment. Delays are quite common in ...
-
 Alcaina-Acosta, José Joaquín; Cuenca, Ángel; Salt Llobregat, Julián José; Casanova Calvo, Vicente; Pizá, Ricardo (Elsevier, 2019-05)[EN] In this paper, a novel delay-independent control structure for a networked control system (NCS) is proposed, where packet-based control strategies with predictor-based and dual-rate control techniques are integrated. ...
Alcaina-Acosta, José Joaquín; Cuenca, Ángel; Salt Llobregat, Julián José; Casanova Calvo, Vicente; Pizá, Ricardo (Elsevier, 2019-05)[EN] In this paper, a novel delay-independent control structure for a networked control system (NCS) is proposed, where packet-based control strategies with predictor-based and dual-rate control techniques are integrated. ... -
Escrivá Salvador, Alberto (Universitat Politècnica de València, 2017-09-26)[ES] En este trabajo se ha realizado el control a distancia de un sistema altamente inestable utilizando un prototipo Segway construido con la plataforma robótica LEGO® MINDSTORMS®. En primer lugar, se ha llevado a cabo ...
Mostrando ítems 1-20 de 48

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
