


Listar por autor "Muñoz Benavent, Pau"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por autor
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por autor "Muñoz Benavent, Pau"
Mostrando ítems 1-20 de 29
-
 Solanes Galbis, Juan Ernesto; Gracia Calandin, Luis Ignacio; Muñoz-Benavent, Pau; Esparza Peidro, Alicia; Valls Miro, Jaime; Tornero Montserrat, Josep (Elsevier, 2018-12)[EN] This work presents a hybrid position/force control of robots for surface contact conditioning tasks such as polishing, profiling, deburring, etc. The robot force control is designed using sliding mode ideas to benefit ...
Solanes Galbis, Juan Ernesto; Gracia Calandin, Luis Ignacio; Muñoz-Benavent, Pau; Esparza Peidro, Alicia; Valls Miro, Jaime; Tornero Montserrat, Josep (Elsevier, 2018-12)[EN] This work presents a hybrid position/force control of robots for surface contact conditioning tasks such as polishing, profiling, deburring, etc. The robot force control is designed using sliding mode ideas to benefit ... -
 Gracia Calandin, Luis Ignacio; Solanes Galbis, Juan Ernesto; Muñoz-Benavent, Pau; Valls Miro, Jaime; Perez-Vidal, Carlos; Tornero Montserrat, Josep (Elsevier, 2018-06)[EN] This work presents a hybrid position-force control of robots in order to apply surface treatments such as polishing, grinding, finishing, deburring, etc. The robot force control is designed using sliding mode concepts ...
Gracia Calandin, Luis Ignacio; Solanes Galbis, Juan Ernesto; Muñoz-Benavent, Pau; Valls Miro, Jaime; Perez-Vidal, Carlos; Tornero Montserrat, Josep (Elsevier, 2018-06)[EN] This work presents a hybrid position-force control of robots in order to apply surface treatments such as polishing, grinding, finishing, deburring, etc. The robot force control is designed using sliding mode concepts ... -
 Muñoz Benavent, Pau; Armesto Ángel, Leopoldo; Girbés Juan, Vicent; Solanes Galbis, Juan Ernesto; Dols Ruiz, Juan Francisco; Muñoz, Adolfo; Tornero Montserrat, Josep (Chinese Institute of Automation Engineers, 2012)This paper describes the automation of a Neighborhood Electric Vehicle (NEV) and the embedded distributed architecture for implementing an Advanced Driving Assistance System (ADAS) with haptic, visual, and audio feedback ...
Muñoz Benavent, Pau; Armesto Ángel, Leopoldo; Girbés Juan, Vicent; Solanes Galbis, Juan Ernesto; Dols Ruiz, Juan Francisco; Muñoz, Adolfo; Tornero Montserrat, Josep (Chinese Institute of Automation Engineers, 2012)This paper describes the automation of a Neighborhood Electric Vehicle (NEV) and the embedded distributed architecture for implementing an Advanced Driving Assistance System (ADAS) with haptic, visual, and audio feedback ... -
 Muñoz-Benavent, Pau; Andreu García, Gabriela; Martínez-Peiró, Joaquín; Puig Pons, Vicente; Morillo-Faro, Andrés; Ordoñez-Cebrian, Patricia; Atienza-Vanacloig, Vicente; Pérez Arjona, Isabel; Espinosa Roselló, Víctor; Alemany, Francisco (MDPI AG, 2024-02)[EN] In this article, the evolution of BFT (bluefin tuna) sizes in fattening cages is studied, for which it was necessary to perform exhaustive monitoring with stereoscopic cameras and an exhaustive analysis of the data ...
Muñoz-Benavent, Pau; Andreu García, Gabriela; Martínez-Peiró, Joaquín; Puig Pons, Vicente; Morillo-Faro, Andrés; Ordoñez-Cebrian, Patricia; Atienza-Vanacloig, Vicente; Pérez Arjona, Isabel; Espinosa Roselló, Víctor; Alemany, Francisco (MDPI AG, 2024-02)[EN] In this article, the evolution of BFT (bluefin tuna) sizes in fattening cages is studied, for which it was necessary to perform exhaustive monitoring with stereoscopic cameras and an exhaustive analysis of the data ... -
 Puig Pons, Vicente; Muñoz-Benavent, Pau; Espinosa Roselló, Víctor; Andreu García, Gabriela; Valiente González, José Miguel; Estruch, V. D.; Ordoñez-Cebrian, Patricia; Pérez Arjona, Isabel; Atienza-Vanacloig, Vicente; Mèlich, Begonya; De la Gandara García, Fernando; Santaella, E. (Elsevier, 2019)[EN] In this work, acoustic and computer vision techniques are combined to develop an automatic procedure for biomass estimation of tuna during transfers. A side scan sonar working at 200¿kHz and a stereo camera, positioned ...
Puig Pons, Vicente; Muñoz-Benavent, Pau; Espinosa Roselló, Víctor; Andreu García, Gabriela; Valiente González, José Miguel; Estruch, V. D.; Ordoñez-Cebrian, Patricia; Pérez Arjona, Isabel; Atienza-Vanacloig, Vicente; Mèlich, Begonya; De la Gandara García, Fernando; Santaella, E. (Elsevier, 2019)[EN] In this work, acoustic and computer vision techniques are combined to develop an automatic procedure for biomass estimation of tuna during transfers. A side scan sonar working at 200¿kHz and a stereo camera, positioned ... -
 Muñoz-Benavent, Pau; Andreu García, Gabriela; Valiente González, José Miguel; Atienza-Vanacloig, Vicente; Puig Pons, Vicente; Espinosa Roselló, Víctor (Oxford University Press, 2018)[EN] This article presents a non-invasive fully automatic procedure for Bluefin Tuna sizing, based on a stereoscopic vision system and a deformable model of the fish ventral silhouette. An image processing procedure is ...
Muñoz-Benavent, Pau; Andreu García, Gabriela; Valiente González, José Miguel; Atienza-Vanacloig, Vicente; Puig Pons, Vicente; Espinosa Roselló, Víctor (Oxford University Press, 2018)[EN] This article presents a non-invasive fully automatic procedure for Bluefin Tuna sizing, based on a stereoscopic vision system and a deformable model of the fish ventral silhouette. An image processing procedure is ... -
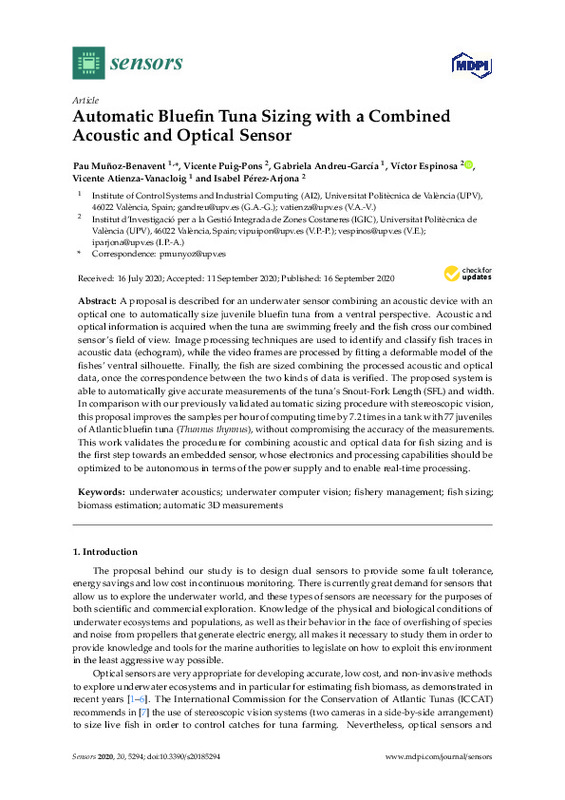 Muñoz-Benavent, Pau; Puig Pons, Vicente; Andreu García, Gabriela; Espinosa Roselló, Víctor; Atienza-Vanacloig, Vicente; Pérez Arjona, Isabel (MDPI AG, 2020-09)[EN] A proposal is described for an underwater sensor combining an acoustic device with an optical one to automatically size juvenile bluefin tuna from a ventral perspective. Acoustic and optical information is acquired ...
Muñoz-Benavent, Pau; Puig Pons, Vicente; Andreu García, Gabriela; Espinosa Roselló, Víctor; Atienza-Vanacloig, Vicente; Pérez Arjona, Isabel (MDPI AG, 2020-09)[EN] A proposal is described for an underwater sensor combining an acoustic device with an optical one to automatically size juvenile bluefin tuna from a ventral perspective. Acoustic and optical information is acquired ... -
 Martínez Peiró, Joaquín (Universitat Politècnica de València, 2022-10-10)[ES] Este trabajo está orientado al desarrollo de un software de estimación de tamaño y peso de individuos en especies marinas, mediante la aplicación de redes neuronales convolucionales y técnicas de visión por computador. ...
Martínez Peiró, Joaquín (Universitat Politècnica de València, 2022-10-10)[ES] Este trabajo está orientado al desarrollo de un software de estimación de tamaño y peso de individuos en especies marinas, mediante la aplicación de redes neuronales convolucionales y técnicas de visión por computador. ... -
 García-Fernández, Alberto; Solanes, J. Ernesto; Gracia Calandin, Luis Ignacio; Muñoz-Benavent, Pau; Girbés-Juan, Vicent; Tornero, Josep (Taylor & Francis, 2022-01-02)[EN] This work develops a method to perform surface treatment tasks using a bimanual robotic system, i.e. two robot arms cooperatively performing the task. In particular, one robot arm holds the work-piece while the other ...
García-Fernández, Alberto; Solanes, J. Ernesto; Gracia Calandin, Luis Ignacio; Muñoz-Benavent, Pau; Girbés-Juan, Vicent; Tornero, Josep (Taylor & Francis, 2022-01-02)[EN] This work develops a method to perform surface treatment tasks using a bimanual robotic system, i.e. two robot arms cooperatively performing the task. In particular, one robot arm holds the work-piece while the other ... -
 Gracia Calandin, Luis Ignacio; Solanes Galbis, Juan Ernesto; Muñoz-Benavent, Pau; Esparza Peidro, Alicia; Valls Miro, Jaime; Tornero Montserrat, Josep (Elsevier, 2018-09)[EN] This work presents a hybrid position/force control of robots aimed at handling applications using multi-task and sliding mode ideas. The proposed robot control is based on a novel adaptive non-conventional sliding ...
Gracia Calandin, Luis Ignacio; Solanes Galbis, Juan Ernesto; Muñoz-Benavent, Pau; Esparza Peidro, Alicia; Valls Miro, Jaime; Tornero Montserrat, Josep (Elsevier, 2018-09)[EN] This work presents a hybrid position/force control of robots aimed at handling applications using multi-task and sliding mode ideas. The proposed robot control is based on a novel adaptive non-conventional sliding ... -
 Arnal Benedicto, Laura (Universitat Politècnica de València, 2013-03-24)[ES] El objetivo de esta tesina es realizar un estudio de algoritmos y paquetes software existentes en la plataforma ROS (Robot Operating System) para la detección de personas, y comprobar el funcionamiento de alguno de ...
Arnal Benedicto, Laura (Universitat Politècnica de València, 2013-03-24)[ES] El objetivo de esta tesina es realizar un estudio de algoritmos y paquetes software existentes en la plataforma ROS (Robot Operating System) para la detección de personas, y comprobar el funcionamiento de alguno de ... -
 Blanes Noguera, Francisco; Muñoz Benavent, Pau; Muñoz Alcobendas, Manuel; Simó Ten, José Enrique; Coronel Parada, Javier Osvaldo; Albero Gil, Miguel (Red de Agentes Fisicos, 2011)[EN] Computer vision is one of the most challenging applications in sensor systems since the signal is complex from spatial and logical point of view. Due to these characteristics vision applications require high ...
Blanes Noguera, Francisco; Muñoz Benavent, Pau; Muñoz Alcobendas, Manuel; Simó Ten, José Enrique; Coronel Parada, Javier Osvaldo; Albero Gil, Miguel (Red de Agentes Fisicos, 2011)[EN] Computer vision is one of the most challenging applications in sensor systems since the signal is complex from spatial and logical point of view. Due to these characteristics vision applications require high ... -
 Muñoz-Benavent, Pau; Andreu García, Gabriela; Valiente González, José Miguel; Atienza-Vanacloig, Vicente; Puig Pons, Vicente; Espinosa Roselló, Víctor (Elsevier, 2018)[EN] This paper presents a non-invasive fully automatic procedure to obtain highly accurate fish length estimation in adult Bluefin Tuna, based on a stereoscopic vision system and a deformable model of the fish ventral ...
Muñoz-Benavent, Pau; Andreu García, Gabriela; Valiente González, José Miguel; Atienza-Vanacloig, Vicente; Puig Pons, Vicente; Espinosa Roselló, Víctor (Elsevier, 2018)[EN] This paper presents a non-invasive fully automatic procedure to obtain highly accurate fish length estimation in adult Bluefin Tuna, based on a stereoscopic vision system and a deformable model of the fish ventral ... -
 Puig Pons, Vicente; Muñoz-Benavent, Pau; Pérez Arjona, Isabel; Ladino-Velásquez, Anderson; Llorens-Escrich, Susana; Andreu García, Gabriela; Valiente González, José Miguel; Atienza-Vanacloig, Vicente; Ordoñez-Cebrian, Patricia; Pastor Gimeno, José Ismael; Espinosa Roselló, Víctor (Elsevier, 2022-08)[EN] This paper proposes an indirect method to estimate Bluefin Tuna (Thunnus thynnus) biomass in cages using acoustic techniques. Two Simrad EK60 echosounders working at 120 and 200 kHz and a stereo camera were used to ...
Puig Pons, Vicente; Muñoz-Benavent, Pau; Pérez Arjona, Isabel; Ladino-Velásquez, Anderson; Llorens-Escrich, Susana; Andreu García, Gabriela; Valiente González, José Miguel; Atienza-Vanacloig, Vicente; Ordoñez-Cebrian, Patricia; Pastor Gimeno, José Ismael; Espinosa Roselló, Víctor (Elsevier, 2022-08)[EN] This paper proposes an indirect method to estimate Bluefin Tuna (Thunnus thynnus) biomass in cages using acoustic techniques. Two Simrad EK60 echosounders working at 120 and 200 kHz and a stereo camera were used to ... -
 Solanes, J. Ernesto; Muñoz-Benavent, Pau; Armesto, Leopoldo; Gracia Calandin, Luis Ignacio; Tornero Montserrat, Josep (Taylor & Francis, 2022-03-04)[EN] This paper develops the application of the Dual Rate Dual Sampling Reference Filtering Control Strategy to 2D and 3D visual feedback control. This strategy allows to overcome the problem of sensor latency and to address ...
Solanes, J. Ernesto; Muñoz-Benavent, Pau; Armesto, Leopoldo; Gracia Calandin, Luis Ignacio; Tornero Montserrat, Josep (Taylor & Francis, 2022-03-04)[EN] This paper develops the application of the Dual Rate Dual Sampling Reference Filtering Control Strategy to 2D and 3D visual feedback control. This strategy allows to overcome the problem of sensor latency and to address ... -
 Solanes Galbis, Juan Ernesto; Gracia Calandin, Luis Ignacio; Muñoz-Benavent, Pau; Valls Miro, Jaime; Carmichael, Marc G.; Tornero Montserrat, Josep (Elsevier, 2018-09)[EN] This work presents an approach based on multi-task, non-conventional sliding mode control and admittance control for human-robot collaboration aimed at handling applications using force feedback. The proposed robot ...
Solanes Galbis, Juan Ernesto; Gracia Calandin, Luis Ignacio; Muñoz-Benavent, Pau; Valls Miro, Jaime; Carmichael, Marc G.; Tornero Montserrat, Josep (Elsevier, 2018-09)[EN] This work presents an approach based on multi-task, non-conventional sliding mode control and admittance control for human-robot collaboration aimed at handling applications using force feedback. The proposed robot ... -
 Gracia Calandin, Luis Ignacio; Solanes Galbis, Juan Ernesto; Muñoz-Benavent, Pau; Valls Miro, Jaime; Perez-Vidal, Carlos; Tornero Montserrat, Josep (John Benjamins Publishing Company, 2019)[EN] This paper presents a human-robot closely collaborative solution to cooperatively perform surface treatment tasks such as polishing, grinding, finishing, deburring, etc. The proposed scheme is based on task priority ...
Gracia Calandin, Luis Ignacio; Solanes Galbis, Juan Ernesto; Muñoz-Benavent, Pau; Valls Miro, Jaime; Perez-Vidal, Carlos; Tornero Montserrat, Josep (John Benjamins Publishing Company, 2019)[EN] This paper presents a human-robot closely collaborative solution to cooperatively perform surface treatment tasks such as polishing, grinding, finishing, deburring, etc. The proposed scheme is based on task priority ... -
 Solanes Galbis, Juan Ernesto; Gracia Calandin, Luis Ignacio; Muñoz-Benavent, Pau; Valls Miro, Jaime; Girbés, Vicent; Tornero Montserrat, Josep (Elsevier, 2018)[EN] This work presents a human-robot closely collaborative solution to cooperatively perform surface treatment tasks such as polishing, grinding, deburring, etc. The method considers two force sensors attached to the ...
Solanes Galbis, Juan Ernesto; Gracia Calandin, Luis Ignacio; Muñoz-Benavent, Pau; Valls Miro, Jaime; Girbés, Vicent; Tornero Montserrat, Josep (Elsevier, 2018)[EN] This work presents a human-robot closely collaborative solution to cooperatively perform surface treatment tasks such as polishing, grinding, deburring, etc. The method considers two force sensors attached to the ... -
 Muñoz-Benavent, Pau; Martínez-Peiró, J.; Andreu García, Gabriela; Puig Pons, Vicente; Espinosa Roselló, Víctor; Pérez Arjona, Isabel; De la Gándara, F.; Ortega, A. (Elsevier, 2022-11)[EN] This paper evaluates the impact of using deep learning techniques in an automatic fish sizing process. Automatic fish sizing with a non-invasive approach involves working with different views of the fish's body and ...
Muñoz-Benavent, Pau; Martínez-Peiró, J.; Andreu García, Gabriela; Puig Pons, Vicente; Espinosa Roselló, Víctor; Pérez Arjona, Isabel; De la Gándara, F.; Ortega, A. (Elsevier, 2022-11)[EN] This paper evaluates the impact of using deep learning techniques in an automatic fish sizing process. Automatic fish sizing with a non-invasive approach involves working with different views of the fish's body and ... -
Oltra Balbastre, Javier (Universitat Politècnica de València, 2018-05-16)En el presente Trabajo Fin de Máster se realiza la implementación de algoritmos de control visual para un robot KUKA. Para ello, en primer lugar, se revisan las bases teóricas sobre control visual. Se presenta la arquitectura ...
Mostrando ítems 1-20 de 29

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
