


Listar por autor "Tornero Montserrat, Josep"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por autor
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por autor "Tornero Montserrat, Josep"
Mostrando ítems 1-20 de 72
-
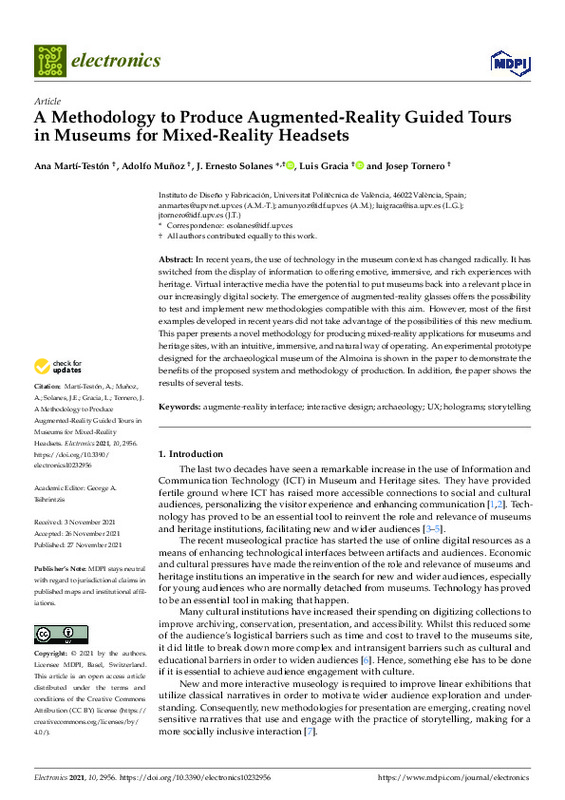 Martí-Testón, Ana; Muñoz García, Adolfo; Solanes Galbis, Juan Ernesto; Gracia Calandin, Luis Ignacio; Tornero Montserrat, Josep (MDPI AG, 2021-12)[EN] In recent years, the use of technology in the museum context has changed radically. It has switched from the display of information to offering emotive, immersive, and rich experiences with heritage. Virtual interactive ...
Martí-Testón, Ana; Muñoz García, Adolfo; Solanes Galbis, Juan Ernesto; Gracia Calandin, Luis Ignacio; Tornero Montserrat, Josep (MDPI AG, 2021-12)[EN] In recent years, the use of technology in the museum context has changed radically. It has switched from the display of information to offering emotive, immersive, and rich experiences with heritage. Virtual interactive ... -
 Solanes Galbis, Juan Ernesto; Gracia Calandin, Luis Ignacio; Muñoz-Benavent, Pau; Esparza Peidro, Alicia; Valls Miro, Jaime; Tornero Montserrat, Josep (Elsevier, 2018-12)[EN] This work presents a hybrid position/force control of robots for surface contact conditioning tasks such as polishing, profiling, deburring, etc. The robot force control is designed using sliding mode ideas to benefit ...
Solanes Galbis, Juan Ernesto; Gracia Calandin, Luis Ignacio; Muñoz-Benavent, Pau; Esparza Peidro, Alicia; Valls Miro, Jaime; Tornero Montserrat, Josep (Elsevier, 2018-12)[EN] This work presents a hybrid position/force control of robots for surface contact conditioning tasks such as polishing, profiling, deburring, etc. The robot force control is designed using sliding mode ideas to benefit ... -
 Gracia Calandin, Luis Ignacio; Solanes Galbis, Juan Ernesto; Muñoz-Benavent, Pau; Valls Miro, Jaime; Perez-Vidal, Carlos; Tornero Montserrat, Josep (Elsevier, 2018-06)[EN] This work presents a hybrid position-force control of robots in order to apply surface treatments such as polishing, grinding, finishing, deburring, etc. The robot force control is designed using sliding mode concepts ...
Gracia Calandin, Luis Ignacio; Solanes Galbis, Juan Ernesto; Muñoz-Benavent, Pau; Valls Miro, Jaime; Perez-Vidal, Carlos; Tornero Montserrat, Josep (Elsevier, 2018-06)[EN] This work presents a hybrid position-force control of robots in order to apply surface treatments such as polishing, grinding, finishing, deburring, etc. The robot force control is designed using sliding mode concepts ... -
 Muñoz Benavent, Pau; Armesto Ángel, Leopoldo; Girbés Juan, Vicent; Solanes Galbis, Juan Ernesto; Dols Ruiz, Juan Francisco; Muñoz, Adolfo; Tornero Montserrat, Josep (Chinese Institute of Automation Engineers, 2012)This paper describes the automation of a Neighborhood Electric Vehicle (NEV) and the embedded distributed architecture for implementing an Advanced Driving Assistance System (ADAS) with haptic, visual, and audio feedback ...
Muñoz Benavent, Pau; Armesto Ángel, Leopoldo; Girbés Juan, Vicent; Solanes Galbis, Juan Ernesto; Dols Ruiz, Juan Francisco; Muñoz, Adolfo; Tornero Montserrat, Josep (Chinese Institute of Automation Engineers, 2012)This paper describes the automation of a Neighborhood Electric Vehicle (NEV) and the embedded distributed architecture for implementing an Advanced Driving Assistance System (ADAS) with haptic, visual, and audio feedback ... -
 González, Claudia; Solanes Galbis, Juan Ernesto; Muñoz García, Adolfo; Gracia Calandin, Luis Ignacio; Girbés-Juan, Vicent; Tornero Montserrat, Josep (Elsevier, 2021-04)[EN] There are some industrial tasks that are still mainly performed manually by human workers due to their complexity, which is the case of surface treatment operations (such as sanding, deburring, finishing, grinding, ...
González, Claudia; Solanes Galbis, Juan Ernesto; Muñoz García, Adolfo; Gracia Calandin, Luis Ignacio; Girbés-Juan, Vicent; Tornero Montserrat, Josep (Elsevier, 2021-04)[EN] There are some industrial tasks that are still mainly performed manually by human workers due to their complexity, which is the case of surface treatment operations (such as sanding, deburring, finishing, grinding, ... -
 Girbés, Vicent; Armesto Ángel, Leopoldo; Dols Ruiz, Juan Francisco; Tornero Montserrat, Josep (Institute of Electrical and Electronics Engineers (IEEE), 2017-02)Accidents in which buses or coaches are involved cause thousands of injuries and fatalities every year. To reduce their number and severity, the paper describes an Advanced Driver Assistance Systems (ADAS) based on a haptic ...
Girbés, Vicent; Armesto Ángel, Leopoldo; Dols Ruiz, Juan Francisco; Tornero Montserrat, Josep (Institute of Electrical and Electronics Engineers (IEEE), 2017-02)Accidents in which buses or coaches are involved cause thousands of injuries and fatalities every year. To reduce their number and severity, the paper describes an Advanced Driver Assistance Systems (ADAS) based on a haptic ... -
 Zanon Heddings, Florencio Jonatan (Universitat Politècnica de València, 2018-02-01)Consulta en la Biblioteca ETSI Industriales (Riunet)
Zanon Heddings, Florencio Jonatan (Universitat Politècnica de València, 2018-02-01)Consulta en la Biblioteca ETSI Industriales (Riunet) -
 Ruiz Piera, Víctor (Universitat Politècnica de València, 2016-12-07)[EN] In this Master Thesis is described the design of a Genetic Algorithm to solve a real industrial problem. This project is managed in The Carbody Inspection Tunel for FORD factories, installed in 7 factories in USA and ...
Ruiz Piera, Víctor (Universitat Politècnica de València, 2016-12-07)[EN] In this Master Thesis is described the design of a Genetic Algorithm to solve a real industrial problem. This project is managed in The Carbody Inspection Tunel for FORD factories, installed in 7 factories in USA and ... -
 García-Fernández, Alberto; Solanes, J. Ernesto; Muñoz García, Adolfo; Gracia Calandin, Luis Ignacio; Tornero Montserrat, Josep (MDPI AG, 2022-05)[EN] Teleoperation of bimanual robots is being used to carry out complex tasks such as surgeries in medicine. Despite the technological advances, current interfaces are not natural to the users, who spend long periods of ...
García-Fernández, Alberto; Solanes, J. Ernesto; Muñoz García, Adolfo; Gracia Calandin, Luis Ignacio; Tornero Montserrat, Josep (MDPI AG, 2022-05)[EN] Teleoperation of bimanual robots is being used to carry out complex tasks such as surgeries in medicine. Despite the technological advances, current interfaces are not natural to the users, who spend long periods of ... -
 García-Fernández, Alberto; Solanes, J. Ernesto; Gracia Calandin, Luis Ignacio; Muñoz-Benavent, Pau; Girbés-Juan, Vicent; Tornero, Josep (Taylor & Francis, 2022-01-02)[EN] This work develops a method to perform surface treatment tasks using a bimanual robotic system, i.e. two robot arms cooperatively performing the task. In particular, one robot arm holds the work-piece while the other ...
García-Fernández, Alberto; Solanes, J. Ernesto; Gracia Calandin, Luis Ignacio; Muñoz-Benavent, Pau; Girbés-Juan, Vicent; Tornero, Josep (Taylor & Francis, 2022-01-02)[EN] This work develops a method to perform surface treatment tasks using a bimanual robotic system, i.e. two robot arms cooperatively performing the task. In particular, one robot arm holds the work-piece while the other ... -
 Andrés de la Esperanza, Francisco Javier; Gracia Calandin, Luis Ignacio; Tornero Montserrat, Josep (Taylor & Francis, 2011-06)This article deals with the tuning of a complex robotic workcell of eight joints devoted to milling tasks. It consists of a KUKA (TM) manipulator mounted on a linear track and synchronised with a rotary table. Prior to any ...
Andrés de la Esperanza, Francisco Javier; Gracia Calandin, Luis Ignacio; Tornero Montserrat, Josep (Taylor & Francis, 2011-06)This article deals with the tuning of a complex robotic workcell of eight joints devoted to milling tasks. It consists of a KUKA (TM) manipulator mounted on a linear track and synchronised with a rotary table. Prior to any ... -
 Andrés de la Esperanza, Francisco Javier; Gracia Calandin, Luis Ignacio; Tornero Montserrat, Josep (Springer Verlag (Germany), 2012-09)This work highlights the applicability of different redundancy resolution schemes to the postprocessing stage from a computer-aided manufacturing (CAM) system to an industrial redundant workcell. The inverse kinematic ...
Andrés de la Esperanza, Francisco Javier; Gracia Calandin, Luis Ignacio; Tornero Montserrat, Josep (Springer Verlag (Germany), 2012-09)This work highlights the applicability of different redundancy resolution schemes to the postprocessing stage from a computer-aided manufacturing (CAM) system to an industrial redundant workcell. The inverse kinematic ... -
 Muñoz García, Adolfo; Martí Testón, Ana; Mahiques, Xavier; Gracia Calandin, Luis Ignacio; Solanes Galbis, Juan Ernesto; Tornero Montserrat, Josep (Elsevier, 2020-01)[EN] This research develops a new mixed reality-based worker interface for industrial camera 3D positioning, which is intuitive and easy to manage, in order to enhance the worker safety, ergonomics and productivity. An ...
Muñoz García, Adolfo; Martí Testón, Ana; Mahiques, Xavier; Gracia Calandin, Luis Ignacio; Solanes Galbis, Juan Ernesto; Tornero Montserrat, Josep (Elsevier, 2020-01)[EN] This research develops a new mixed reality-based worker interface for industrial camera 3D positioning, which is intuitive and easy to manage, in order to enhance the worker safety, ergonomics and productivity. An ... -
 Girbés Juan, Vicent (Universitat Politècnica de València, 2016-06-02)[EN] Nowadays, there are many electronic products that incorporate elements and features coming from the research in the field of mobile robotics. For instance, the well-known vacuum cleaning robot Roomba by iRobot, which ...
Girbés Juan, Vicent (Universitat Politècnica de València, 2016-06-02)[EN] Nowadays, there are many electronic products that incorporate elements and features coming from the research in the field of mobile robotics. For instance, the well-known vacuum cleaning robot Roomba by iRobot, which ... -
 Girbés-Juan, Vicent; Schettino, Vinicius; Gracia Calandin, Luis Ignacio; Solanes, J. Ernesto; Demiris, Yiannis; Tornero, Josep (Springer-Verlag, 2022-06)[EN] High dexterity is required in tasks in which there is contact between objects, such as surface conditioning (wiping, polishing, scuffing, sanding, etc.), specially when the location of the objects involved is unknown ...
Girbés-Juan, Vicent; Schettino, Vinicius; Gracia Calandin, Luis Ignacio; Solanes, J. Ernesto; Demiris, Yiannis; Tornero, Josep (Springer-Verlag, 2022-06)[EN] High dexterity is required in tasks in which there is contact between objects, such as surface conditioning (wiping, polishing, scuffing, sanding, etc.), specially when the location of the objects involved is unknown ... -
 Gracia Calandin, Luis Ignacio; Solanes Galbis, Juan Ernesto; Muñoz-Benavent, Pau; Esparza Peidro, Alicia; Valls Miro, Jaime; Tornero Montserrat, Josep (Elsevier, 2018-09)[EN] This work presents a hybrid position/force control of robots aimed at handling applications using multi-task and sliding mode ideas. The proposed robot control is based on a novel adaptive non-conventional sliding ...
Gracia Calandin, Luis Ignacio; Solanes Galbis, Juan Ernesto; Muñoz-Benavent, Pau; Esparza Peidro, Alicia; Valls Miro, Jaime; Tornero Montserrat, Josep (Elsevier, 2018-09)[EN] This work presents a hybrid position/force control of robots aimed at handling applications using multi-task and sliding mode ideas. The proposed robot control is based on a novel adaptive non-conventional sliding ... -
Desarrollo de integración de un sistema de seguimiento de un vehículo aéreo controlado remotamente Royo Navarro, Míriam (Universitat Politècnica de València, 2017-01-23)Proyecto Confidencial (Riunet)
-
Martínez Simó, Carlos (Universitat Politècnica de València, 2016-09-27)Consulta en la Biblioteca ETSI Industriales (Riunet)
-
Moyano Medina, Jaime Enrique (Universitat Politècnica de València, 2018-11-26)[ES] El objetivo de este proyecto es diseñar un Panel de Instrumentación que pueda ser instalado en la planta de ensamblaje de carrocerías de la factoría Ford-España en Almussafes, atendiendo a la distribución actual de ...
-
 Perez-Vidal, Carlos; Gracia Calandin, Luis Ignacio; Sanchez-Caballero, Samuel; Solanes Galbis, Juan Ernesto; Saccon, Alessandro; Tornero Montserrat, Josep (Taylor & Francis, 2019-09-02)[EN] A collaborative tool for robotic polishing is developed in this work in order to allow the simultaneous operation of the robot system and human operator to cooperatively carry out the polishing task. For this purpose, ...
Perez-Vidal, Carlos; Gracia Calandin, Luis Ignacio; Sanchez-Caballero, Samuel; Solanes Galbis, Juan Ernesto; Saccon, Alessandro; Tornero Montserrat, Josep (Taylor & Francis, 2019-09-02)[EN] A collaborative tool for robotic polishing is developed in this work in order to allow the simultaneous operation of the robot system and human operator to cooperatively carry out the polishing task. For this purpose, ...
Mostrando ítems 1-20 de 72

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
