


Listar por autor "Sala Piqueras, Antonio"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por autor
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por autor "Sala Piqueras, Antonio"
Mostrando ítems 1-20 de 122
-
 Sala, Antonio (Elsevier, 2013-08-16)This is a book review of Stability Analysis of Fuzzy-Model-Based Control Systems, H.K. Lam, F.H.F. Leung. Springer (2011), ISBN: 978-3642178436
Sala, Antonio (Elsevier, 2013-08-16)This is a book review of Stability Analysis of Fuzzy-Model-Based Control Systems, H.K. Lam, F.H.F. Leung. Springer (2011), ISBN: 978-3642178436 -
 Cuenca Lacruz, Ángel Miguel; Salt Llobregat, Julián José; Sala Piqueras, Antonio; Pizá Fernández, Ricardo (Institute of Electrical and Electronics Engineers (IEEE), 2011-02)n this paper, a methodology to design controllers able to cope with different load conditions on an Ethernet network is introduced. Load conditions induce time-varying delays between measurements and control. To face these ...
Cuenca Lacruz, Ángel Miguel; Salt Llobregat, Julián José; Sala Piqueras, Antonio; Pizá Fernández, Ricardo (Institute of Electrical and Electronics Engineers (IEEE), 2011-02)n this paper, a methodology to design controllers able to cope with different load conditions on an Ethernet network is introduced. Load conditions induce time-varying delays between measurements and control. To face these ... -
 Gonzalez-German, Ivan Temoatzin; Sala, Antonio; Bernal Reza, Miguel Ángel (Elsevier, 2019-02-01)[EN] This work generalises the line-integral Lyapunov function in (Rhee and Won, 2006) for stability analysis of continuous-time nonlinear models expressed as fuzzy systems. The referred result applied only to Takagi¿Sugeno ...
Gonzalez-German, Ivan Temoatzin; Sala, Antonio; Bernal Reza, Miguel Ángel (Elsevier, 2019-02-01)[EN] This work generalises the line-integral Lyapunov function in (Rhee and Won, 2006) for stability analysis of continuous-time nonlinear models expressed as fuzzy systems. The referred result applied only to Takagi¿Sugeno ... -
 Diaz, Henry; Sala, Antonio; Armesto Ángel, Leopoldo (De Gruyter Open Sp. z o.o., 2020-06)[EN] The linear programming (LP) approach to solve the Bellman equation in dynamic programming is a well-known option for finite state and input spaces to obtain an exact solution. However, with function approximation or ...
Diaz, Henry; Sala, Antonio; Armesto Ángel, Leopoldo (De Gruyter Open Sp. z o.o., 2020-06)[EN] The linear programming (LP) approach to solve the Bellman equation in dynamic programming is a well-known option for finite state and input spaces to obtain an exact solution. However, with function approximation or ... -
 Salt Llobregat, Julián José; Sala Piqueras, Antonio (Elsevier, 2014-12-01)This paper addresses an easy computation of the multiple components of the response to a sinusoidal input of a dual-rate linear time-invariant discrete system from the Bode diagram of LTI systems arising from a lifted ...
Salt Llobregat, Julián José; Sala Piqueras, Antonio (Elsevier, 2014-12-01)This paper addresses an easy computation of the multiple components of the response to a sinusoidal input of a dual-rate linear time-invariant discrete system from the Bode diagram of LTI systems arising from a lifted ... -
 Gracia Calandin, Luis Ignacio; Sala, Antonio; Garelli, Fabricio (Elsevier, 2012-06)This work presents a sliding-mode method for robotic path conditioning. The proposal includes a trap avoidance algorithm in order to escape from trap situations, which are analogous to local minima in potential field-based ...
Gracia Calandin, Luis Ignacio; Sala, Antonio; Garelli, Fabricio (Elsevier, 2012-06)This work presents a sliding-mode method for robotic path conditioning. The proposal includes a trap avoidance algorithm in order to escape from trap situations, which are analogous to local minima in potential field-based ... -
 Gracia Calandin, Luis Ignacio; Sala, Antonio; Garelli, Fabricio (Elsevier, 2012-01)An approach based on geometric invariance and sliding mode ideas is proposed for redundancy resolution in robotic systems to fulfill configuration and workspace constraints caused by robot mechanical limits, collision ...
Gracia Calandin, Luis Ignacio; Sala, Antonio; Garelli, Fabricio (Elsevier, 2012-01)An approach based on geometric invariance and sliding mode ideas is proposed for redundancy resolution in robotic systems to fulfill configuration and workspace constraints caused by robot mechanical limits, collision ... -
 Salt Llobregat, Julián José; Sala, Antonio; Albertos Pérez, Pedro (Institute of Electrical and Electronics Engineers (IEEE), 2011-09)An algebraic design via Diophantine equations of dual-rate regulators for linear unstable and non-minimum-phase plants, generalizing the well-known constraints for the reference model in single-rate systems, is presented ...
Salt Llobregat, Julián José; Sala, Antonio; Albertos Pérez, Pedro (Institute of Electrical and Electronics Engineers (IEEE), 2011-09)An algebraic design via Diophantine equations of dual-rate regulators for linear unstable and non-minimum-phase plants, generalizing the well-known constraints for the reference model in single-rate systems, is presented ... -
 Sala, Antonio; Armesto, Leopoldo (Elsevier, 2022-01)[EN] This work proposes a new criterion for adaptive meshing in polyhedral partitions which interpolate a value function in Approximate Dynamic Programming (ADP) in optimal control problems. The criterion adds new points ...
Sala, Antonio; Armesto, Leopoldo (Elsevier, 2022-01)[EN] This work proposes a new criterion for adaptive meshing in polyhedral partitions which interpolate a value function in Approximate Dynamic Programming (ADP) in optimal control problems. The criterion adds new points ... -
 Diez Ruano, José Luís; Navarro Herrero, José Luís; Sala Piqueras, Antonio (Universitat Politècnica de València, 2010-10-01)[ES] La aplicación de las técnicas de agrupamiento borroso para la identificación de modelos borrosos se está extendiendo cada vez más. Sin embargo, y dado que su origen es bien distinto a la ingeniería de control, aparecen ...
Diez Ruano, José Luís; Navarro Herrero, José Luís; Sala Piqueras, Antonio (Universitat Politècnica de València, 2010-10-01)[ES] La aplicación de las técnicas de agrupamiento borroso para la identificación de modelos borrosos se está extendiendo cada vez más. Sin embargo, y dado que su origen es bien distinto a la ingeniería de control, aparecen ... -
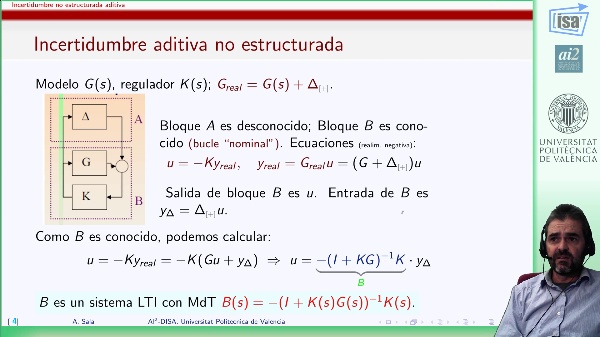 Sala Piqueras, Antonio (Universitat Politècnica de València, 2017-11-28)Este objeto de aprendizaje describe cómo utilizar el teorema de pequeña ganancia para determinar el margen de estabilidad de un controlador prefijado ante incertidumbre aditiva no estructurada (análisis de estabilidad robusta).
Sala Piqueras, Antonio (Universitat Politècnica de València, 2017-11-28)Este objeto de aprendizaje describe cómo utilizar el teorema de pequeña ganancia para determinar el margen de estabilidad de un controlador prefijado ante incertidumbre aditiva no estructurada (análisis de estabilidad robusta). -
Pastor Alcaraz, José Manuel (Universitat Politècnica de València, 2017-02-07)[EN] The aim of this master thesis is to study the state of art of reinforment learning, particularly those based on policy search methods and to apply such techniques to a 3DOFs inverted pendulum mechanism. The controller ...
-
 Ariño-Latorre, Carlos Vicente; Sala, Antonio; Pérez Soler, Emilio; Bedate Boluda, Fernando; Querol-Ferrer, Andrés (Elsevier, 2017-06-01)[EN] Given a Takagi-Sugeno (TS) system, this paper proposes a novel methodology to obtain the state feedback controller guaranteeing, asymptotically as a Polya-related complexity parameter grows, the largest (membership-shape ...
Ariño-Latorre, Carlos Vicente; Sala, Antonio; Pérez Soler, Emilio; Bedate Boluda, Fernando; Querol-Ferrer, Andrés (Elsevier, 2017-06-01)[EN] Given a Takagi-Sugeno (TS) system, this paper proposes a novel methodology to obtain the state feedback controller guaranteeing, asymptotically as a Polya-related complexity parameter grows, the largest (membership-shape ... -
 Girbes-Juan, Vicent; Armesto, Leopoldo; Hernandez-Ferrandiz, Daniel; Dols Ruiz, Juan Francisco; Sala, Antonio (Institute of Electrical and Electronics Engineers, 2021-08-04)[EN] In heavy-duty vehicles, multiple signals are available to estimate the vehicle's kinematics, such as Inertial Measurement Unit (IMU), Global Positioning System (GPS) and linear and angular speed readings from wheel ...
Girbes-Juan, Vicent; Armesto, Leopoldo; Hernandez-Ferrandiz, Daniel; Dols Ruiz, Juan Francisco; Sala, Antonio (Institute of Electrical and Electronics Engineers, 2021-08-04)[EN] In heavy-duty vehicles, multiple signals are available to estimate the vehicle's kinematics, such as Inertial Measurement Unit (IMU), Global Positioning System (GPS) and linear and angular speed readings from wheel ... -
Sanz Moltó, Joan (Universitat Politècnica de València, 2013-05-10)Proyecto Confidencial
-
 Girbés-Juan, Vicent; Moll, Joaquín; Sala, Antonio; Armesto, Leopoldo (MDPI AG, 2023-08)[EN] In this paper, a procedure for experimental optimization under safety constraints, to be denoted as constraint-aware Bayesian Optimization, is presented. The basic ingredients are a performance objective function and ...
Girbés-Juan, Vicent; Moll, Joaquín; Sala, Antonio; Armesto, Leopoldo (MDPI AG, 2023-08)[EN] In this paper, a procedure for experimental optimization under safety constraints, to be denoted as constraint-aware Bayesian Optimization, is presented. The basic ingredients are a performance objective function and ... -
 Sala, Antonio; Pitarch Pérez, Jose Luis (John Wiley & Sons, 2015)[EN] This note points out that controllers resulting from Corollaries 3.1 and 3.2 and Theorem 3.1 in Saat and Nguang (Int. J. Robust Nonlinear Control 2013; 10.1002/rnc.3130) do not improve over the open-loop performance.
Sala, Antonio; Pitarch Pérez, Jose Luis (John Wiley & Sons, 2015)[EN] This note points out that controllers resulting from Corollaries 3.1 and 3.2 and Theorem 3.1 in Saat and Nguang (Int. J. Robust Nonlinear Control 2013; 10.1002/rnc.3130) do not improve over the open-loop performance. -
 Sala Piqueras, Antonio (Universitat Politècnica de València, 2017-03-13)El presente vídeo compara las prestaciones nominales de dos reguladores PID de ganancias baja y alta, respectivamente, cuando son aplicados a modelos diferentes del nominal, simulando posibles errores de modelado en ...
Sala Piqueras, Antonio (Universitat Politècnica de València, 2017-03-13)El presente vídeo compara las prestaciones nominales de dos reguladores PID de ganancias baja y alta, respectivamente, cuando son aplicados a modelos diferentes del nominal, simulando posibles errores de modelado en ... -
 Sala Piqueras, Antonio (Universitat Politècnica de València, 2017-03-13)Este vídeo presenta el concepto de ganancia máxima y mínima de una matriz y el número de condición. Se discute su importancia para garantizar la corrección en la práctica de soluciones de ingeniería obtenidas con modelos ...
Sala Piqueras, Antonio (Universitat Politècnica de València, 2017-03-13)Este vídeo presenta el concepto de ganancia máxima y mínima de una matriz y el número de condición. Se discute su importancia para garantizar la corrección en la práctica de soluciones de ingeniería obtenidas con modelos ... -
 Armesto, Leopoldo; Moura, Joao; Ivan, Vladimir; Erden, Mustafa Suphi; Sala, Antonio; Vijayakumar, Sethu (SAGE Publications, 2018-12)[EN] Many practical tasks in robotic systems, such as cleaning windows, writing, or grasping, are inherently constrained. Learning policies subject to constraints is a challenging problem. In this paper, we propose a method ...
Armesto, Leopoldo; Moura, Joao; Ivan, Vladimir; Erden, Mustafa Suphi; Sala, Antonio; Vijayakumar, Sethu (SAGE Publications, 2018-12)[EN] Many practical tasks in robotic systems, such as cleaning windows, writing, or grasping, are inherently constrained. Learning policies subject to constraints is a challenging problem. In this paper, we propose a method ...
Mostrando ítems 1-20 de 122

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
