


Listar por autor "Blanes Noguera, Juan Francisco"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por autor
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por autor "Blanes Noguera, Juan Francisco"
Mostrando ítems 21-40 de 81
-
 Muñoz Alcobendas, Manuel (Universitat Politècnica de València, 2011-09-09)Los objetivos de este trabajo, giran en torno al diseño, desarrollo, implementación y evaluación de un sistema de control de movimientos para el robot humanoide microBIROII, tomando el prototipo mecánico del mismo como ...
Muñoz Alcobendas, Manuel (Universitat Politècnica de València, 2011-09-09)Los objetivos de este trabajo, giran en torno al diseño, desarrollo, implementación y evaluación de un sistema de control de movimientos para el robot humanoide microBIROII, tomando el prototipo mecánico del mismo como ... -
Benlloch Faus, Andrés (Universitat Politècnica de València, 2016-05-13)[ES] En este Trabajo Fin de Grado se aborda el diseño de un módulo de comunicaciones FINS-TCP, protocolo que utilizan los equipos de la empresa OMRON, principalmente PLC's, para comunicarse entre ellos o con otros ...
-
 Maila Andrango, Edison Santiago (Universitat Politècnica de València, 2019-11-06)[ES] El presente trabajo corresponde al desarrollo de un sistema de monitorización para dos plantas piloto, mediante un servidor OPC-UA empotrado. Para el control de la primera planta piloto; la encargada del desarrollo ...
Maila Andrango, Edison Santiago (Universitat Politècnica de València, 2019-11-06)[ES] El presente trabajo corresponde al desarrollo de un sistema de monitorización para dos plantas piloto, mediante un servidor OPC-UA empotrado. Para el control de la primera planta piloto; la encargada del desarrollo ... -
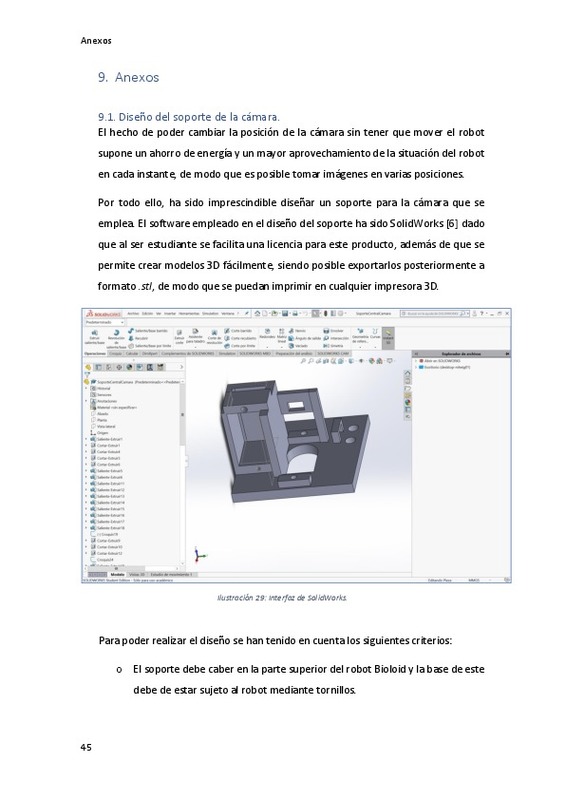
 Bengochea Carrasco, Antonio (Universitat Politècnica de València, 2018-01-08)Este trabajo pretende unir las metodologías de desarrollo software y la programación de robots humanoides para el desarrollo de un sistema que permita una fácil programación y facilite su futura ampliación. Debido a las ...
Bengochea Carrasco, Antonio (Universitat Politècnica de València, 2018-01-08)Este trabajo pretende unir las metodologías de desarrollo software y la programación de robots humanoides para el desarrollo de un sistema que permita una fácil programación y facilite su futura ampliación. Debido a las ... -
Alcázar Ballesta, Joaquín (Universitat Politècnica de València, 2016-09-05)[EN] This project 's main objective is the implementation of an on-line simulation system, to provide at any moment a simulated blood glucose value that a human would , given the physical exercise developed. This system ...
-
 Escudero Peñalver, María (Universitat Politècnica de València, 2021-01-21)[ES] Los sistemas de supervisión y control están sufriendo actualmente una gran evolución con la introducción de nuevas herramientas software. Cada vez son más la herramientas que abogan por el uso de protocolos standard ...
Escudero Peñalver, María (Universitat Politècnica de València, 2021-01-21)[ES] Los sistemas de supervisión y control están sufriendo actualmente una gran evolución con la introducción de nuevas herramientas software. Cada vez son más la herramientas que abogan por el uso de protocolos standard ... -
 Meseguer Valenzuela, Andrés (Universitat Politècnica de València, 2019-10-23)[ES] En el presente proyecto se pretende desarrollar un sistema de percepción para un robot humanoide Bioloid, basado en una cámara como sensor principal, complementado con una IMU para reforzar la información de visión. ...
Meseguer Valenzuela, Andrés (Universitat Politècnica de València, 2019-10-23)[ES] En el presente proyecto se pretende desarrollar un sistema de percepción para un robot humanoide Bioloid, basado en una cámara como sensor principal, complementado con una IMU para reforzar la información de visión. ... -
Gijón Garzás, Pablo José (Universitat Politècnica de València, 2015-11-16)Consulta en la Biblioteca ETSI Industriales (Riunet)
-
Alcover Aguilar, Carles (Universitat Politècnica de València, 2015-12-30)Consulta en la Biblioteca ETSI Industriales (Riunet)
-
 López Mora, Ester (Universitat Politècnica de València, 2021-01-19)[ES] Actualmente es más habitual encontrar robots colaborativos en entornos de producción de las empresas dada su versatilidad, facilidad de programación e instalación. Especialmente en los aspectos de interacción física ...
López Mora, Ester (Universitat Politècnica de València, 2021-01-19)[ES] Actualmente es más habitual encontrar robots colaborativos en entornos de producción de las empresas dada su versatilidad, facilidad de programación e instalación. Especialmente en los aspectos de interacción física ... -
Añón Sevilla, Víctor (Universitat Politècnica de València, 2020-10-14)[ES] Actualmente es más habitual encontrar robots colaborativos en entornos de producción de las empresas dada su versatilidad, facilidad de programación e instalación. Especialmente en los aspectos de interacción física ...
-
 Aparicio Alonso, Eduardo (Universitat Politècnica de València, 2022-10-10)[ES] En este proyecto se pretende obtener un sistema basado en redes neuronales que, en tiempo real, sea capaz de detectar el mejor agarre robótico del objeto más accesible entre los detectados en ese instante en un entorno ...
Aparicio Alonso, Eduardo (Universitat Politècnica de València, 2022-10-10)[ES] En este proyecto se pretende obtener un sistema basado en redes neuronales que, en tiempo real, sea capaz de detectar el mejor agarre robótico del objeto más accesible entre los detectados en ese instante en un entorno ... -
Reina González, Miguel Ángel (Universitat Politècnica de València, 2017-07-06)Consulta en la Biblioteca ETSI Industriales (Riunet)
-
Vanderhaegen, Alec (Universitat Politècnica de València, 2019-10-24)[ES] El propósito de esta tesis de maestría es desarrollar un prototipo de un wearable útil para su integración en un páncreas artificial (sistema de control automático de glucosa) para adultos con diabetes tipo 1. Este ...
-
Albero Gil, Miguel (Universitat Politècnica de València, 2014-05-27)Consulta en la Biblioteca ETSI Industriales (3844)
-
 Galiana Llinares, Antonio Nadal (Universitat Politècnica de València, 2017-10-25)La diabetes es aquella situación en la que los niveles de azúcar (o glucosa) en la sangre están alterados. Una persona tiene diabetes cuando existe un trastorno en la producción o utilización de la insulina (hormona que ...
Galiana Llinares, Antonio Nadal (Universitat Politècnica de València, 2017-10-25)La diabetes es aquella situación en la que los niveles de azúcar (o glucosa) en la sangre están alterados. Una persona tiene diabetes cuando existe un trastorno en la producción o utilización de la insulina (hormona que ... -
 Badiola Scarcella, Delfina Amaia (Universitat Politècnica de València, 2023-07-26)[ES] El presente proyecto se enmarca dentro de la práctica realizada en la empresa Dismuntel, la cual se dedica al desarrollo de sistemas electrónicos a medida, incluyendo los encargados de controlar grupos electrógenos. En ...
Badiola Scarcella, Delfina Amaia (Universitat Politècnica de València, 2023-07-26)[ES] El presente proyecto se enmarca dentro de la práctica realizada en la empresa Dismuntel, la cual se dedica al desarrollo de sistemas electrónicos a medida, incluyendo los encargados de controlar grupos electrógenos. En ... -
Castillo Setembre, Héctor (Universitat Politècnica de València, 2021-10-21)[ES] El trabajo aborda el diseño y desarrollo de un sistema de supervisión que deberá proporcionar información sobre un proceso de fabricación completo sobre una planta piloto FESTO. Este proceso además de las estaciones ...
-
 Benavent Puertos, Antoni (Universitat Politècnica de València, 2017-01-20)[EN] The work aims to develop the data acquisition system connected using an I2C IMU with a BEAGLEBONE Black board. This system will be part of an humanoid robot (Bioloid) embedded control system. After data acquisition a ...
Benavent Puertos, Antoni (Universitat Politècnica de València, 2017-01-20)[EN] The work aims to develop the data acquisition system connected using an I2C IMU with a BEAGLEBONE Black board. This system will be part of an humanoid robot (Bioloid) embedded control system. After data acquisition a ... -
 Gutiérrez Aparicio, César (Universitat Politècnica de València, 2023-10-28)[ES] En esta tesis se presenta el diseño, desarrollo y simulación de un brazo colaborativo Universal Robots mediante comunicaciones OPC UA y CoppeliaSim, con el objetivo de crear un gemelo digital. Un gemelo digital es ...
Gutiérrez Aparicio, César (Universitat Politècnica de València, 2023-10-28)[ES] En esta tesis se presenta el diseño, desarrollo y simulación de un brazo colaborativo Universal Robots mediante comunicaciones OPC UA y CoppeliaSim, con el objetivo de crear un gemelo digital. Un gemelo digital es ...
Mostrando ítems 21-40 de 81

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
