


Listar por palabra clave "Abb"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por palabra clave
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por palabra clave "Abb"
Mostrando ítems 1-20 de 28
-
 Moltó Martínez, Germán (Universitat Politècnica de València, 2010-05-12)Introducción a la Estructura de Datos Árbol Binario de Búsqueda. Principales características y operaciones más significativas.
Moltó Martínez, Germán (Universitat Politècnica de València, 2010-05-12)Introducción a la Estructura de Datos Árbol Binario de Búsqueda. Principales características y operaciones más significativas. -
 Roger Folch, José (Universitat Politècnica de València, 2012-07-02)Video didáctico de introduccion al automata ACS500 de ABB asi como a su software de programación Codesys 2.3
Roger Folch, José (Universitat Politècnica de València, 2012-07-02)Video didáctico de introduccion al automata ACS500 de ABB asi como a su software de programación Codesys 2.3 -
 Pineda Sánchez, Manuel (Universitat Politècnica de València, 2012-07-04)Video didáctico de como realizar una visualización desde el software codesys V2.3 de un programa de control para un automata programable de la familia ACS500 de ABB.
Pineda Sánchez, Manuel (Universitat Politècnica de València, 2012-07-04)Video didáctico de como realizar una visualización desde el software codesys V2.3 de un programa de control para un automata programable de la familia ACS500 de ABB. -
 Jiménez Carvajal, Jesús (Universitat Politècnica de València, 2015-06-25)Este proyecto, está caracterizado por el desarrollo del modelo cinemático directo y simulación dinámica de un robot industrial de la corporación multinacional de ABB, centrándose en el estudio del modelo IRB 2400-16 mediante ...
Jiménez Carvajal, Jesús (Universitat Politècnica de València, 2015-06-25)Este proyecto, está caracterizado por el desarrollo del modelo cinemático directo y simulación dinámica de un robot industrial de la corporación multinacional de ABB, centrándose en el estudio del modelo IRB 2400-16 mediante ... -
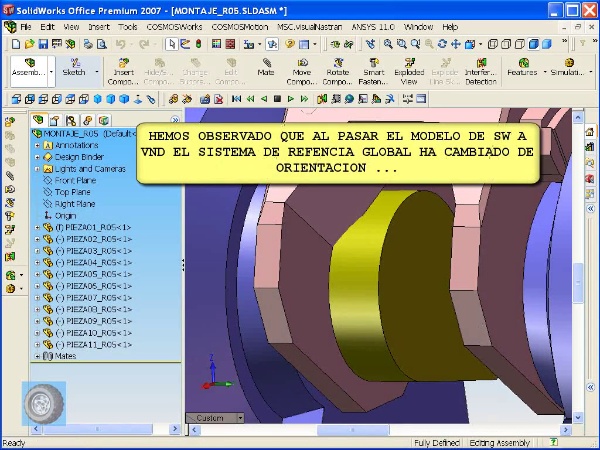
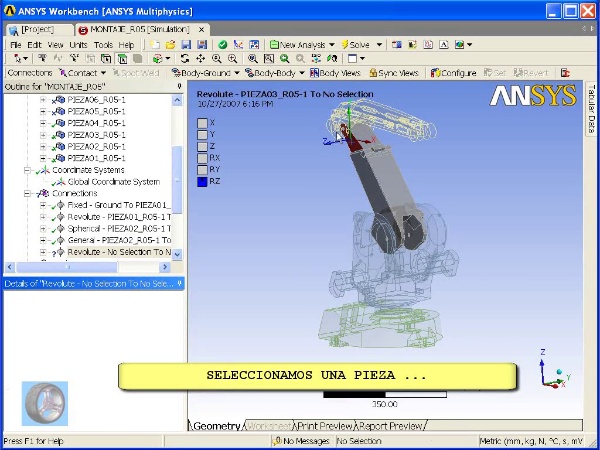
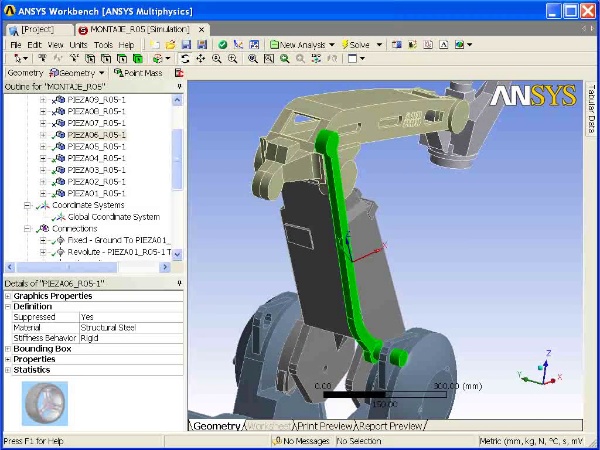
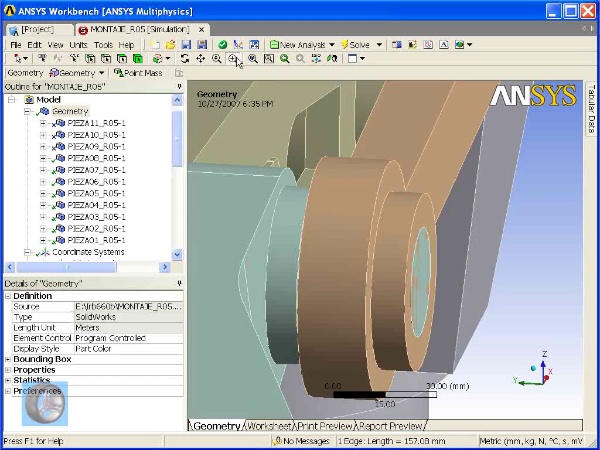
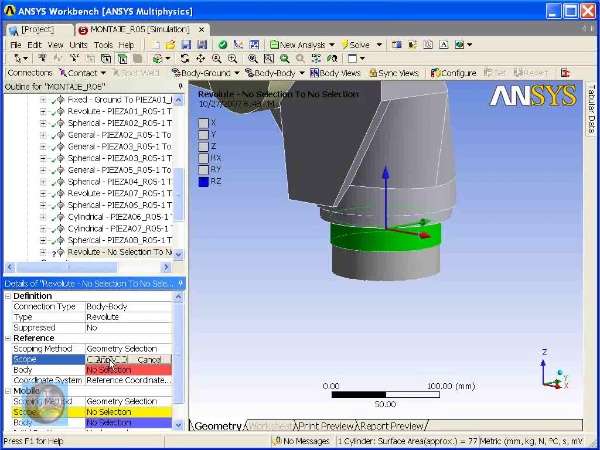
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 01 DE 07 - MONTAJE DE LAS TRES PRIMERAS PIEZAS - Partiendo del modelo geométrico del robot en SW (Solidworks), en esta presentación vamos a mostrar como crear un modelo cinemático operativo en el entorno del programa ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 01 DE 07 - MONTAJE DE LAS TRES PRIMERAS PIEZAS - Partiendo del modelo geométrico del robot en SW (Solidworks), en esta presentación vamos a mostrar como crear un modelo cinemático operativo en el entorno del programa ... -
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 02 DE 07 - MONTAJE DE LA CUARTA PIEZA Y ELIMINACION DE RESTRICCIONES EN EXCESO - En este tramo vamos a insertar en el modelo cinemático la cuarta pieza y eliminaremos todas las restricciones en exceso, utilizando ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 02 DE 07 - MONTAJE DE LA CUARTA PIEZA Y ELIMINACION DE RESTRICCIONES EN EXCESO - En este tramo vamos a insertar en el modelo cinemático la cuarta pieza y eliminaremos todas las restricciones en exceso, utilizando ... -
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 03 DE 07 - MONTAJE DE LAS PIEZAS CINCO Y SEIS Y ELIMINACION DE RESTRICCIONES EN EXCESO - En este tramo montaremos las piezas cinco y seis. Empezaremos ubicando los "Coord" necesarios. Par ubicar los "Coord" de la ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 03 DE 07 - MONTAJE DE LAS PIEZAS CINCO Y SEIS Y ELIMINACION DE RESTRICCIONES EN EXCESO - En este tramo montaremos las piezas cinco y seis. Empezaremos ubicando los "Coord" necesarios. Par ubicar los "Coord" de la ... -
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 04 DE 07 - MONTAJE DE LA PIEZA SIETE Y ELIMINACION DE RESTRICCIONES EN EXCESO - En este tramo vamos a insertar en el modelo cinemático la pieza siete. Definiendo los pares de tal forma que no existan restricciones ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 04 DE 07 - MONTAJE DE LA PIEZA SIETE Y ELIMINACION DE RESTRICCIONES EN EXCESO - En este tramo vamos a insertar en el modelo cinemático la pieza siete. Definiendo los pares de tal forma que no existan restricciones ... -
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 05 DE 07 - MONTAJE DE LA PIEZA OCHO Y ELIMINACION DE RESTRICCIONES EN EXCESO - En este tramo vamos a insertar en el modelo cinemático la pieza ocho. Redefiniendo adecuadamente los pares cinemáticos para enviar la ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 05 DE 07 - MONTAJE DE LA PIEZA OCHO Y ELIMINACION DE RESTRICCIONES EN EXCESO - En este tramo vamos a insertar en el modelo cinemático la pieza ocho. Redefiniendo adecuadamente los pares cinemáticos para enviar la ... -
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 06 DE 07 - MONTAJE DE LAS PIEZAS NUEVE Y DIEZ Y ELIMINACION DE RESTRICCIONES EN EXCESO - En este tramo vamos a insertar en el modelo cinemático las piezas nueve y diez, redefiniendo los tipos de los pares cinemáticos, ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 06 DE 07 - MONTAJE DE LAS PIEZAS NUEVE Y DIEZ Y ELIMINACION DE RESTRICCIONES EN EXCESO - En este tramo vamos a insertar en el modelo cinemático las piezas nueve y diez, redefiniendo los tipos de los pares cinemáticos, ... -
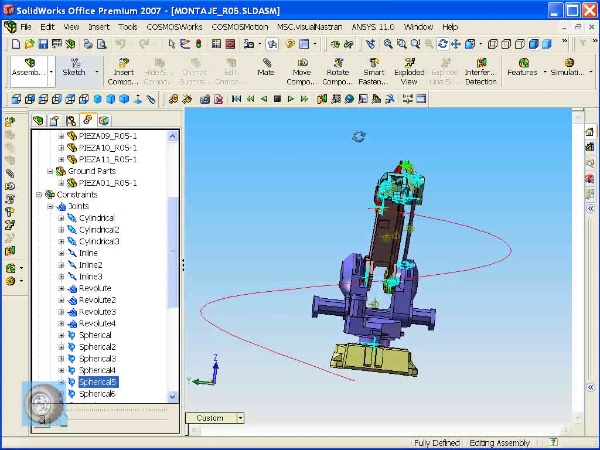
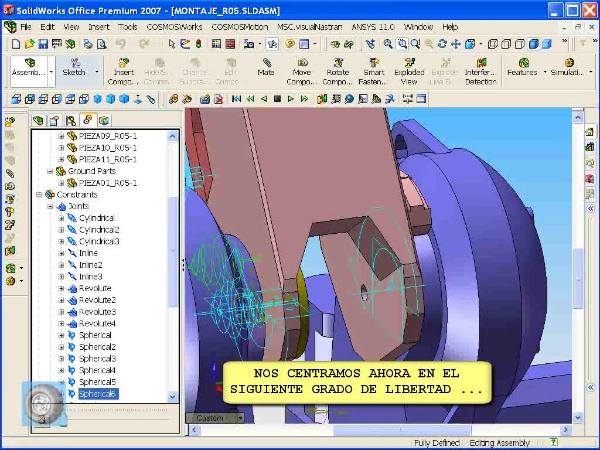 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 07 DE 07 - MONTAJE DE LA PIEZA ONCE Y DEFINICION DE MOVIMIENTO EN LOS GRADOS DE LIBERTAD DEL MODELO - En este último tramo de la presentación procederemos a insertar en el modelo cinemático la última de las piezas y ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 07 DE 07 - MONTAJE DE LA PIEZA ONCE Y DEFINICION DE MOVIMIENTO EN LOS GRADOS DE LIBERTAD DEL MODELO - En este último tramo de la presentación procederemos a insertar en el modelo cinemático la última de las piezas y ... -
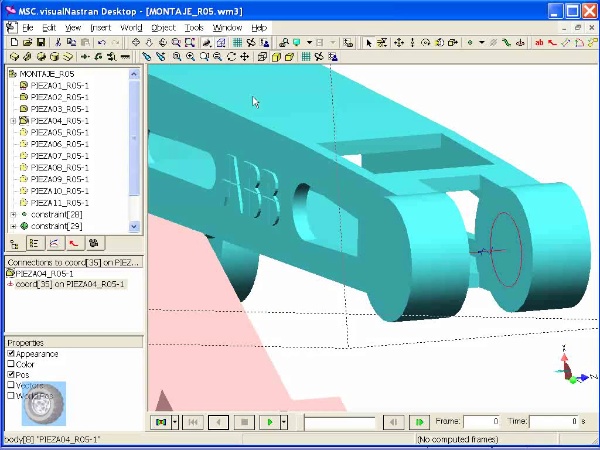
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 01 DE 07 - MONTAJE DE LAS DOS PRIMERAS PIEZAS - Partiendo del modelo montado en Solidworks y simulado cinemáticamente mediante "Cosmos Motion", en este tramo y los que siguen se va a mostrar como simular cinemáticamente ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 01 DE 07 - MONTAJE DE LAS DOS PRIMERAS PIEZAS - Partiendo del modelo montado en Solidworks y simulado cinemáticamente mediante "Cosmos Motion", en este tramo y los que siguen se va a mostrar como simular cinemáticamente ... -
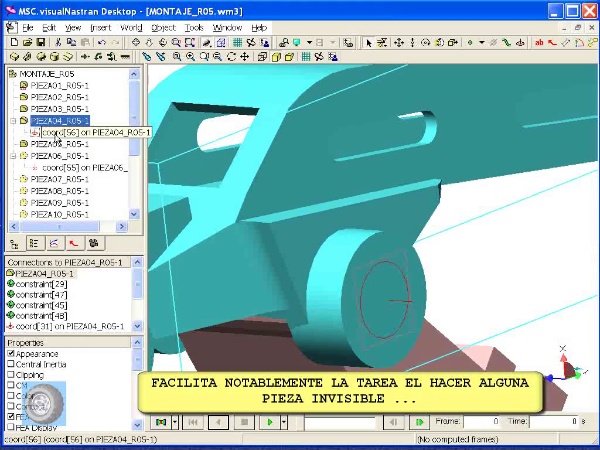
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 02 DE 07 - MONTAJE DE LA TERCERA PIEZA Y ELIMINACION RESTRICCIONES EN EXCESO - En este tramo procederemos a insertar en el modelo cinemático la pieza 03, a definir los pares cinemáticos en los lugares en los que tiene ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 02 DE 07 - MONTAJE DE LA TERCERA PIEZA Y ELIMINACION RESTRICCIONES EN EXCESO - En este tramo procederemos a insertar en el modelo cinemático la pieza 03, a definir los pares cinemáticos en los lugares en los que tiene ... -
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 03 DE 07 - MONTAJE DE LA CUARTA Y QUINTA PIEZAS Y ELIMINACION RESTRICCIONES EN EXCESO - En este tramo procederemos a insertar en el modelo cinemático las piezas 04 y 05, a definir los pares cinemáticos en los lugares ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 03 DE 07 - MONTAJE DE LA CUARTA Y QUINTA PIEZAS Y ELIMINACION RESTRICCIONES EN EXCESO - En este tramo procederemos a insertar en el modelo cinemático las piezas 04 y 05, a definir los pares cinemáticos en los lugares ... -
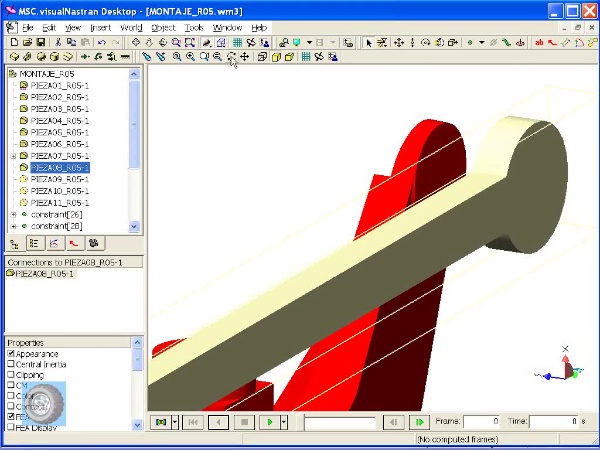
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 04 DE 07 - MONTAJE DE LA SEXTA Y SEPTIMA PIEZAS Y ELIMINACION RESTRICCIONES EN EXCESO - En esta tramo se procede a insertar en el modelo cinemático las piezas 06 y 07, definiendo pares cinemáticos en los lugares que ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 04 DE 07 - MONTAJE DE LA SEXTA Y SEPTIMA PIEZAS Y ELIMINACION RESTRICCIONES EN EXCESO - En esta tramo se procede a insertar en el modelo cinemático las piezas 06 y 07, definiendo pares cinemáticos en los lugares que ... -
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 05 DE 07 - MONTAJE DE LA OCTAVA PIEZA Y ELIMINACION RESTRICCIONES EN EXCESO - En este tramo vamos a insertar en el modelo cinemático la pieza 08, definiendo los pares cinemáticos existentes entre ellas y las demás ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 05 DE 07 - MONTAJE DE LA OCTAVA PIEZA Y ELIMINACION RESTRICCIONES EN EXCESO - En este tramo vamos a insertar en el modelo cinemático la pieza 08, definiendo los pares cinemáticos existentes entre ellas y las demás ... -
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 06 DE 07 - MONTAJE DE LA NOVENA, DECIMA Y UNDECIMA PIEZAS Y ELIMINACION RESTRICCIONES EN EXCESO - En este tramo procedemos a insertar en el modelo cinemático las piezas novena, decima y undécima, definiendo los pares ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 06 DE 07 - MONTAJE DE LA NOVENA, DECIMA Y UNDECIMA PIEZAS Y ELIMINACION RESTRICCIONES EN EXCESO - En este tramo procedemos a insertar en el modelo cinemático las piezas novena, decima y undécima, definiendo los pares ... -
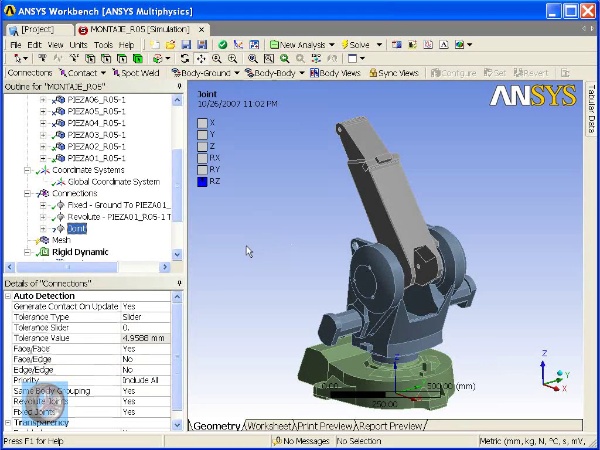
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 07 DE 07 - SIMULACION DEL MODELO CINEMATICO BAJO LA ACCION DE MOTORES ACTUANDO SOBRE LOS GRADOS DE LIBERTAD - En este ultimo tramo de la presentación se procede a analizar el movimiento del modelo conducido por motores ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 07 DE 07 - SIMULACION DEL MODELO CINEMATICO BAJO LA ACCION DE MOTORES ACTUANDO SOBRE LOS GRADOS DE LIBERTAD - En este ultimo tramo de la presentación se procede a analizar el movimiento del modelo conducido por motores ... -
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 10 DE 10 - DEFINICION DEL MOVIMIENTO EN LOS GRADOS DE LIBERTAD DEL MODELO CINEMATICO - En este tramo vamos a definir un movimiento coherente en todos los grados de libertad del modelo cinemático en CM. Comenzamos por ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 10 DE 10 - DEFINICION DEL MOVIMIENTO EN LOS GRADOS DE LIBERTAD DEL MODELO CINEMATICO - En este tramo vamos a definir un movimiento coherente en todos los grados de libertad del modelo cinemático en CM. Comenzamos por ... -
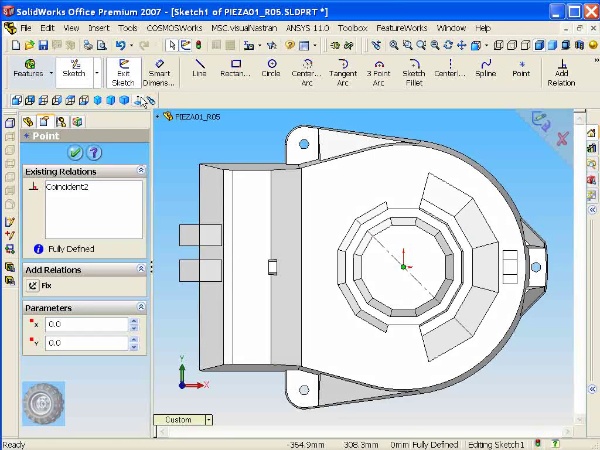
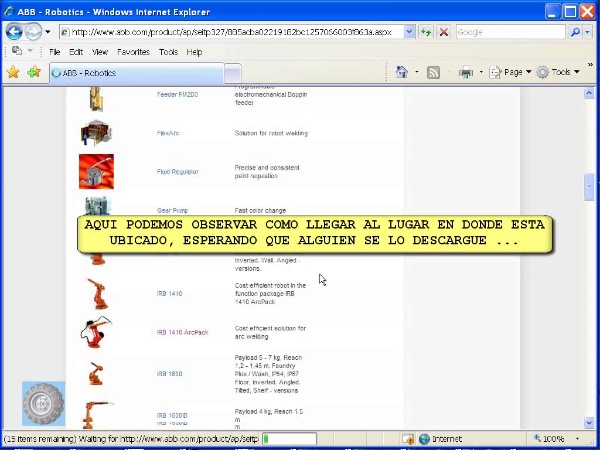 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 01 DE 10 - IDENTIFICACION DE PIEZAS FUNDAMENTALES - Partiendo de un modelo geométrico de robot ABB, directamente seleccionado y descargado de la página web del ABB, este y los videos que le siguen, tiene como objetivo ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 01 DE 10 - IDENTIFICACION DE PIEZAS FUNDAMENTALES - Partiendo de un modelo geométrico de robot ABB, directamente seleccionado y descargado de la página web del ABB, este y los videos que le siguen, tiene como objetivo ...
Mostrando ítems 1-20 de 28

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
