


Listar por palabra clave "Adaptive control"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por palabra clave
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por palabra clave "Adaptive control"
Mostrando ítems 1-20 de 21
-
 Cazalilla, J.; Vallés Miquel, Marina; Mata Amela, Vicente; Díaz Rodríguez, Miguel Ángel; Valera Fernández, Ángel (Elsevier, 2014-10)Model-based control improves robot performance provided that the dynamics parameters are estimated accurately. However, some of the model parameters change with time, e.g. friction parameters and unknown payload. Particularly, ...
Cazalilla, J.; Vallés Miquel, Marina; Mata Amela, Vicente; Díaz Rodríguez, Miguel Ángel; Valera Fernández, Ángel (Elsevier, 2014-10)Model-based control improves robot performance provided that the dynamics parameters are estimated accurately. However, some of the model parameters change with time, e.g. friction parameters and unknown payload. Particularly, ... -
 Aguado, Alberto (Universitat Politècnica de València, 2010-09-27)[EN] In this paper, a predictive-adaptive controller based on a so called “pseudo-state space” model is described. The proposed algorithm has, among other advantages, the fact that the square root of the Riccati matrix is ...
Aguado, Alberto (Universitat Politècnica de València, 2010-09-27)[EN] In this paper, a predictive-adaptive controller based on a so called “pseudo-state space” model is described. The proposed algorithm has, among other advantages, the fact that the square root of the Riccati matrix is ... -
 Pataro, Igor M. L.; D. Gil, Juan; Guzmán, José L.; M. Lemos, João (Universitat Politècnica de València, 2023-11-08)[EN] This paper proposes an adaptive tuning method for the Linear-Quadratic FeedForward (LQ-FF) optimal controller. The procedure aims to reject disturbances while maintaining the reference tracking performance of the ...
Pataro, Igor M. L.; D. Gil, Juan; Guzmán, José L.; M. Lemos, João (Universitat Politècnica de València, 2023-11-08)[EN] This paper proposes an adaptive tuning method for the Linear-Quadratic FeedForward (LQ-FF) optimal controller. The procedure aims to reject disturbances while maintaining the reference tracking performance of the ... -
 Prian Rodríguez, Manuel; López Sánchez, Manuel J.; Moreno Verdulla, J. Francisco (Universitat Politècnica de València, 2015-04-12)[ES] En este trabajo, se propone un método de control híbrido adaptativo, que estabiliza sistemas caóticos en la vecindad de órbitas periódicas inestables embebidas en atractores extraños. El método está basado en la acción ...
Prian Rodríguez, Manuel; López Sánchez, Manuel J.; Moreno Verdulla, J. Francisco (Universitat Politècnica de València, 2015-04-12)[ES] En este trabajo, se propone un método de control híbrido adaptativo, que estabiliza sistemas caóticos en la vecindad de órbitas periódicas inestables embebidas en atractores extraños. El método está basado en la acción ... -
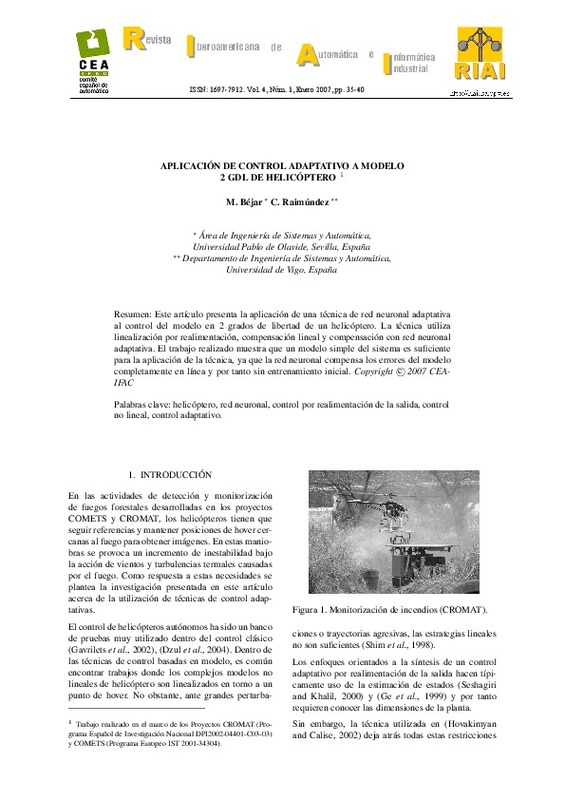 Béjar, M.; Raimúndez, C. (Universitat Politècnica de València, 2009-12-02)[ES] Este artículo presenta la aplicación de una técnica de red neuronal adaptativa al control del modelo en 2 grados de libertad de un helicóptero. La técnica utiliza linealización por realimentación, compensación lineal ...
Béjar, M.; Raimúndez, C. (Universitat Politècnica de València, 2009-12-02)[ES] Este artículo presenta la aplicación de una técnica de red neuronal adaptativa al control del modelo en 2 grados de libertad de un helicóptero. La técnica utiliza linealización por realimentación, compensación lineal ... -
Herrero, Pau; Bondía Company, Jorge; Giménez, M.; Oliver, Nick; Georgiou, Pantelis (SAGE Publications, 2018-03-01)[EN] Background: People with insulin-dependent diabetes rely on an intensified insulin regimen. Despite several guidelines, they are usually impractical and fall short in achieving optimal glycemic outcomes. In this work, ...
-
 Travieso-Torres, Juan Carlos; Duarte-Mermoud, Manuel A.; Gutiérrez-Osorio, Antonio; Beytía, Orlando (Universitat Politècnica de València, 2018-03-05)[ES] En este artículo científico se proponen dos estrategias de control basado en pasividad, una adaptable y la otra no adaptable para cierta clase de sistemas no lineales. A diferencia de la estrategia de control no ...
Travieso-Torres, Juan Carlos; Duarte-Mermoud, Manuel A.; Gutiérrez-Osorio, Antonio; Beytía, Orlando (Universitat Politècnica de València, 2018-03-05)[ES] En este artículo científico se proponen dos estrategias de control basado en pasividad, una adaptable y la otra no adaptable para cierta clase de sistemas no lineales. A diferencia de la estrategia de control no ... -
 Muñoz, V. F.; García Morales, I.; Pérez del Pulgar, C.; Gómez de Gabriel, J. M.; Fernández Lozano, J. J.; García Cerezo, A.; Vara, C.; Toscano, R. (Universitat Politècnica de València, 2009-12-03)[EN] This paper is focuses on the motion control applied to a cameraman robotic assistant for minimally invasive surgery. In particular, this paper is devoted to the camera navigation problem refered to robots endowed with ...
Muñoz, V. F.; García Morales, I.; Pérez del Pulgar, C.; Gómez de Gabriel, J. M.; Fernández Lozano, J. J.; García Cerezo, A.; Vara, C.; Toscano, R. (Universitat Politècnica de València, 2009-12-03)[EN] This paper is focuses on the motion control applied to a cameraman robotic assistant for minimally invasive surgery. In particular, this paper is devoted to the camera navigation problem refered to robots endowed with ... -
 Rubio, Francisco R.; Ortega, Manuel G.; Gordillo, Francisco (Universitat Politècnica de València, 2010-10-08)[ES] Este artículo presenta una aplicación de control para la estabilización inercial de una plataforma de dos grados de libertad (2-GDL). El objetivo de la aplicación es, en primer lugar, controlar las posiciones angulares ...
Rubio, Francisco R.; Ortega, Manuel G.; Gordillo, Francisco (Universitat Politècnica de València, 2010-10-08)[ES] Este artículo presenta una aplicación de control para la estabilización inercial de una plataforma de dos grados de libertad (2-GDL). El objetivo de la aplicación es, en primer lugar, controlar las posiciones angulares ... -
 Sánchez-Sánchez, P.; Arteaga-Pérez, M. A. (Universitat Politècnica de València, 2020-09-30)[ES] La manipulación cooperativa de un objeto por dos o más brazos robóticos requiere controlar tanto el movimiento del objeto como las fuerzas ejercidas por los manipuladores. En términos de cinemática y estática, el ...
Sánchez-Sánchez, P.; Arteaga-Pérez, M. A. (Universitat Politècnica de València, 2020-09-30)[ES] La manipulación cooperativa de un objeto por dos o más brazos robóticos requiere controlar tanto el movimiento del objeto como las fuerzas ejercidas por los manipuladores. En términos de cinemática y estática, el ... -
 Simarro Fernández, Raúl; Albertos Pérez, Pedro; Simó Ten, José Enrique (Association for Computing Machinery (ACM), 2013-02)[EN] A control system with distributed computing resources always should guarantee the safe control of the plant. In this contribution, the concept of control kernel is used for that purpose. Two types of nodes with different ...
Simarro Fernández, Raúl; Albertos Pérez, Pedro; Simó Ten, José Enrique (Association for Computing Machinery (ACM), 2013-02)[EN] A control system with distributed computing resources always should guarantee the safe control of the plant. In this contribution, the concept of control kernel is used for that purpose. Two types of nodes with different ... -
 Vacca Sisterna, Carlos; Serrano, Emanuel; Scaglia, Gustavo; Rossomando, Francisco (Universitat Politècnica de València, 2021-12-17)[EN] This work proposes the design of an adaptive controller for a marine vessel; the proposed control strategy applies a controller designed on linear algebra for the kinematics and an adaptive control technique for the ...
Vacca Sisterna, Carlos; Serrano, Emanuel; Scaglia, Gustavo; Rossomando, Francisco (Universitat Politècnica de València, 2021-12-17)[EN] This work proposes the design of an adaptive controller for a marine vessel; the proposed control strategy applies a controller designed on linear algebra for the kinematics and an adaptive control technique for the ... -
Ruiz Riquelme, Daniel (Universitat Politècnica de València, 2017-01-13)[EN] exogenous insulin is realisable, there are a lot of external factors that makes difficult for patients to manage their glucose levels. Several achievements in continuous subcutaneous insulin infusion (CSII) and ...
-
 Sánchez-Sánchez, Pablo; Cebada Reyes, José Guillermo; Montiel Martínez, Aideé; Reyes Cortés, José Fernando (Universitat Politècnica de València, 2023-12-22)[EN] In this article, the use of Model Reference Adaptive Control (MRAC) is proposed as a technique to regulate a system with input delay. As a case study, a thermal system represented by a cabin dehydrator is considered. ...
Sánchez-Sánchez, Pablo; Cebada Reyes, José Guillermo; Montiel Martínez, Aideé; Reyes Cortés, José Fernando (Universitat Politècnica de València, 2023-12-22)[EN] In this article, the use of Model Reference Adaptive Control (MRAC) is proposed as a technique to regulate a system with input delay. As a case study, a thermal system represented by a cabin dehydrator is considered. ... -
Casabán Lillo, Ernest (Universitat Politècnica de València, 2015-05-13)The present M.Sc thesis is focused on studying an integrated reconfigurable control and guidance approach for recovering a small fixed-wing UAV from different actuator faults, which cover locked in place (stuck), floating ...
-
 Prian Rodríguez, Manuel; López Sánchez, Manuel J.; Moreno Verdulla, J. Francisco (Universitat Politècnica de València, 2017-12-05)[ES] En este trabajo se propone un sistema de control equivalente a un método numérico para el cálculo de los puntos de equilibrio de sistemas dinámicos, donde dichos equilibrios pueden ser empleados como señal de referencia ...
Prian Rodríguez, Manuel; López Sánchez, Manuel J.; Moreno Verdulla, J. Francisco (Universitat Politècnica de València, 2017-12-05)[ES] En este trabajo se propone un sistema de control equivalente a un método numérico para el cálculo de los puntos de equilibrio de sistemas dinámicos, donde dichos equilibrios pueden ser empleados como señal de referencia ... -
 Escarabajal-Sánchez, Rafael José; Pulloquinga-Zapata, José Luis; Mata Amela, Vicente; Valera Fernández, Ángel; Díaz-Rodríguez, Miguel (MDPI AG, 2023-03)[EN] Parallel robots are being increasingly used as a fundamental component of lower-limb rehabilitation systems. During rehabilitation therapies, the parallel robot must interact with the patient, which raises several ...
Escarabajal-Sánchez, Rafael José; Pulloquinga-Zapata, José Luis; Mata Amela, Vicente; Valera Fernández, Ángel; Díaz-Rodríguez, Miguel (MDPI AG, 2023-03)[EN] Parallel robots are being increasingly used as a fundamental component of lower-limb rehabilitation systems. During rehabilitation therapies, the parallel robot must interact with the patient, which raises several ... -
 Caparroz, Malena; Otálora, Pablo; Guzmán, José Luis; Berenguel, Manuel; Acién, Francisco Gabriel (Universitat Politècnica de València, 2023-09-29)[EN] This work proposes the obtaining and use of regression tree models for the prediction of pH and its control in clean water raceway photobioreactors, taking into account the different operating conditions to which the ...
Caparroz, Malena; Otálora, Pablo; Guzmán, José Luis; Berenguel, Manuel; Acién, Francisco Gabriel (Universitat Politècnica de València, 2023-09-29)[EN] This work proposes the obtaining and use of regression tree models for the prediction of pH and its control in clean water raceway photobioreactors, taking into account the different operating conditions to which the ... -
 Pandey, Varun (Universitat Politècnica de València, 2021-10-04)[ES] La necesidad de mejorar el consumo de combustible y las emisiones de los sistemas propulsivos de automoción en condiciones reales de conducción es la base de esta tesis. Para ello, se exploran dos ejes: En primer lugar, ...
Pandey, Varun (Universitat Politècnica de València, 2021-10-04)[ES] La necesidad de mejorar el consumo de combustible y las emisiones de los sistemas propulsivos de automoción en condiciones reales de conducción es la base de esta tesis. Para ello, se exploran dos ejes: En primer lugar, ... -
 De Battista, Hernán; Picó-Marco, Enric; Santos-Navarro, Fernando Nóbel; Picó, Jesús (Institute of Electrical and Electronics Engineers, 2019-07-04)[EN] Turbidostats are a class of bioreactors gaining interest due to the recent availability of microscale and small-scale devices for characterization and scalingup of the biotechnological systems relevant in the biotech ...
De Battista, Hernán; Picó-Marco, Enric; Santos-Navarro, Fernando Nóbel; Picó, Jesús (Institute of Electrical and Electronics Engineers, 2019-07-04)[EN] Turbidostats are a class of bioreactors gaining interest due to the recent availability of microscale and small-scale devices for characterization and scalingup of the biotechnological systems relevant in the biotech ...
Mostrando ítems 1-20 de 21

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
