


Listar por palabra clave "Control PID"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por palabra clave
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por palabra clave "Control PID"
Mostrando ítems 1-20 de 49
-
 Vázquez, Ulises; González-Sierra, Jaime; Fernández-Anaya, Guillermo; Hernández-Martínez, Eduardo Gamaliel (Universitat Politècnica de València, 2021-12-17)[EN] This work deals with the tracking trajectory problem for a differential-drive mobile robot taking into account a dynamic extension from the kinematic model and, controlling a front point located at a certain distance ...
Vázquez, Ulises; González-Sierra, Jaime; Fernández-Anaya, Guillermo; Hernández-Martínez, Eduardo Gamaliel (Universitat Politècnica de València, 2021-12-17)[EN] This work deals with the tracking trajectory problem for a differential-drive mobile robot taking into account a dynamic extension from the kinematic model and, controlling a front point located at a certain distance ... -
 Belda Soriano, Josep (Universitat Politècnica de València, 2020-05-27)[ES] A dia de hui, la impressió 3D es coneguda al món tecnològic degut a la seua gran quantitat d aplicacions, des de l estampació d objectes quotidians fins a dissenys específics amb altes especificacions. Cal recordar ...
Belda Soriano, Josep (Universitat Politècnica de València, 2020-05-27)[ES] A dia de hui, la impressió 3D es coneguda al món tecnològic degut a la seua gran quantitat d aplicacions, des de l estampació d objectes quotidians fins a dissenys específics amb altes especificacions. Cal recordar ... -
 Ollervides, Javier; Santibáñez, Víctor; Llama, Miguel; Dzul, Alejandro (Universitat Politècnica de València, 2010-07-09)[EN] In this work, a comparative experimental study of a fuzzy control scheme applied to a magnetic levitation system is presented. In this study, the experimental system responses for the case of position regulation of a ...
Ollervides, Javier; Santibáñez, Víctor; Llama, Miguel; Dzul, Alejandro (Universitat Politècnica de València, 2010-07-09)[EN] In this work, a comparative experimental study of a fuzzy control scheme applied to a magnetic levitation system is presented. In this study, the experimental system responses for the case of position regulation of a ... -
 Castellano Rioja, Pau (Universitat Politècnica de València, 2019-12-16)[ES] El TFG aborda el diseño del sistema de control continuo de adición de gas carbónico mediante PLC para una línea de embotellado de vino. El proyecto aborda desde el diseño del cuadro de control hasta la implementación ...
Castellano Rioja, Pau (Universitat Politècnica de València, 2019-12-16)[ES] El TFG aborda el diseño del sistema de control continuo de adición de gas carbónico mediante PLC para una línea de embotellado de vino. El proyecto aborda desde el diseño del cuadro de control hasta la implementación ... -
Mira Francés, Héctor (Universitat Politècnica de València, 2021-01-22)[ES] Se va a realizar el estudio de una máquina de inyección de plástico para realizar la automatización y control del proceso de fabricación. La máquina está compuesta por una prensa hidráulica, un extrusor calefactado, ...
-
 Ruiz, Ángel; Jiménez, Jorge E.; Sánchez, José; Dormido, Sebastián (Universitat Politècnica de València, 2013-07-09)[ES] La teoría de control PID en su vertiente discreta, apoyándose en una gestión periódica de los muestreos (eventos planificados en tiempo) se considera un área madura dentro del paradigma del control automático. Por el ...
Ruiz, Ángel; Jiménez, Jorge E.; Sánchez, José; Dormido, Sebastián (Universitat Politècnica de València, 2013-07-09)[ES] La teoría de control PID en su vertiente discreta, apoyándose en una gestión periódica de los muestreos (eventos planificados en tiempo) se considera un área madura dentro del paradigma del control automático. Por el ... -
 Alfaro, V.M.; Arrieta, O.; Vilanova, R. (Universitat Politècnica de València, 2009-04-07)[ES] El presente artículo muestra la aplicación de los controladores PID de dos grados de libertad, a un conjunto de modelos con dinámicas diversas, representativos de procesos en el ámbito industrial. Este tipo de estructura ...
Alfaro, V.M.; Arrieta, O.; Vilanova, R. (Universitat Politècnica de València, 2009-04-07)[ES] El presente artículo muestra la aplicación de los controladores PID de dos grados de libertad, a un conjunto de modelos con dinámicas diversas, representativos de procesos en el ámbito industrial. Este tipo de estructura ... -
 Cirre, Cristina M.; Valenzuela, Loreto; Berenguel, Manuel; Camacho, Eduardo F. (Universitat Politècnica de València, 2010-10-01)[ES] En este trabajo se muestran los resultados de operación de un campo de colectores solares del tipo cilindro parabólico de forma automática con una estructura de control por adelanto en paralelo con un controlador tipo ...
Cirre, Cristina M.; Valenzuela, Loreto; Berenguel, Manuel; Camacho, Eduardo F. (Universitat Politècnica de València, 2010-10-01)[ES] En este trabajo se muestran los resultados de operación de un campo de colectores solares del tipo cilindro parabólico de forma automática con una estructura de control por adelanto en paralelo con un controlador tipo ... -
 Morilla, Fernando; Garrido, Juan; Vázquez, Francisco (Universitat Politècnica de València, 2013-01-13)[ES] La interacción entre variables es una característica inherente de los procesos multivariables, que dificulta su operación y el diseño de sus sistemas de control. Bajo el paradigma de Control por desacoplo se agrupan ...
Morilla, Fernando; Garrido, Juan; Vázquez, Francisco (Universitat Politècnica de València, 2013-01-13)[ES] La interacción entre variables es una característica inherente de los procesos multivariables, que dificulta su operación y el diseño de sus sistemas de control. Bajo el paradigma de Control por desacoplo se agrupan ... -
 Mercader, P.; Cánovas, C. D.; Baños, A. (Universitat Politècnica de València, 2018-12-13)[EN] This document presents the proposal of the authors to the Control Engineering Benchmark 2016, organized by the Control Engineering Group of the Spanish Committee of Automatica. This is the winner design in the ...
Mercader, P.; Cánovas, C. D.; Baños, A. (Universitat Politècnica de València, 2018-12-13)[EN] This document presents the proposal of the authors to the Control Engineering Benchmark 2016, organized by the Control Engineering Group of the Spanish Committee of Automatica. This is the winner design in the ... -
 Vilanova, Ramón; Alfaro, Víctor M. (Elsevier, 2011-07-10)[ES] En este trabajo se presenta una perspectiva general de los diferentes enfoques existentes, con que se ha afrontado el problema de obtener un controlador proporcional integral derivativo (PID) robusto. La estructura ...
Vilanova, Ramón; Alfaro, Víctor M. (Elsevier, 2011-07-10)[ES] En este trabajo se presenta una perspectiva general de los diferentes enfoques existentes, con que se ha afrontado el problema de obtener un controlador proporcional integral derivativo (PID) robusto. La estructura ... -
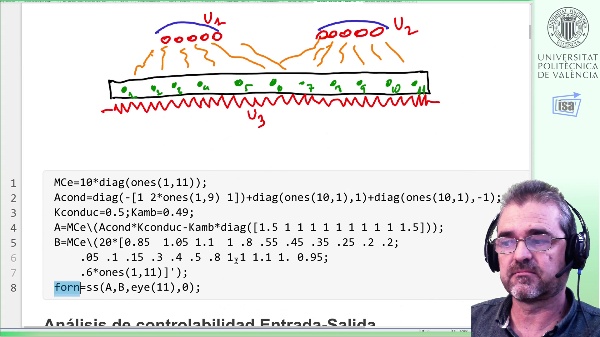 Sala Piqueras, Antonio (2021-06-09)Este vídeo desarrolla el diseño del control por desacoplamiento SVD de un modelo de horno lineal. Se dedica hasta el minuto [02:50] a revisar el modelado y controlabilidad entrada/salida de forma rápida. Se sintonizan ...
Sala Piqueras, Antonio (2021-06-09)Este vídeo desarrolla el diseño del control por desacoplamiento SVD de un modelo de horno lineal. Se dedica hasta el minuto [02:50] a revisar el modelado y controlabilidad entrada/salida de forma rápida. Se sintonizan ... -
Morcillo Pastor, Marcos (Universitat Politècnica de València, 2021-09-20)[ES] Los objetivos del trabajo son el diseño y la automatización de un sistema formado por una estación de tratamiento de piezas, constituido por un horno y un sistema de mecanizado, y un brazo manipulador robótico. Cada ...
-
 Panal Requena, Carlos (Universitat Politècnica de València, 2016-06-15)[ES] El presente proyecto consiste en el desarrollo de una aplicación que permita el control automático de la planta piloto UniPro. El control consiste en el uso de dos electroválvulas para regular dos señales medidas ...
Panal Requena, Carlos (Universitat Politècnica de València, 2016-06-15)[ES] El presente proyecto consiste en el desarrollo de una aplicación que permita el control automático de la planta piloto UniPro. El control consiste en el uso de dos electroválvulas para regular dos señales medidas ... -
Galán Torán, Carlos (Universitat Politècnica de València, 2016-10-14)[ES] Durante los útlimos años se ha intentado innovar con nuevas tecnologías y estudios para la minimización de los diversos constituyentes en las estaciones depuradoras de aguas residuales. El Benchmark Simulation Moden ...
-
Segura Garcia, Daniel (2021-03-12)[ES] El objeto de este proyecto es la implementación de un programa en código C++ con el compilador C++ Builder 7.0, que permita realizar un control PID, mediante la tarjeta de adquisición de datos NI USB-6008 a ...
-
 Cappelletti, Carlos A.; Adam, Eduardo J. (Elsevier, 2016-01-10)[EN] This paper presents the controller design for output feedback by using LMI to filfull H2 and H∞ performance criteria and pole placement. Based on the above design, it is shown how to compute the parameters of a PID ...
Cappelletti, Carlos A.; Adam, Eduardo J. (Elsevier, 2016-01-10)[EN] This paper presents the controller design for output feedback by using LMI to filfull H2 and H∞ performance criteria and pole placement. Based on the above design, it is shown how to compute the parameters of a PID ... -
Haro Javaloyes, Sergio (Universitat Politècnica de València, 2019-12-26)[ES] El presente trabajo tiene como objetivo fundamental la elaboración de un sistema de control para el aterrizaje de una aeronave no tripulada, con el fin de ser capaz de realizar dicha maniobra de forma automática y ...
-
Mekinyan, Tigran (Universitat Politècnica de València, 2015-10-15)[ES] El objetivo del proyecto es el diseño e implementación de un péndulo invertido utilizando una serie de datos de entrada y salida, servomotores y comunicación Bluetooth. La idea general es construir un “Segway” simple ...
-
 Iranzo Juan, Ignacio (Universitat Politècnica de València, 2021-09-16)[ES] En el presente trabajo se ha abordado el reto de diseñar e implementar de un sistema de control que permita regular tanto la velocidad de rotación como el ángulo de giro de un motor de continua mediante un microprocesador ...
Iranzo Juan, Ignacio (Universitat Politècnica de València, 2021-09-16)[ES] En el presente trabajo se ha abordado el reto de diseñar e implementar de un sistema de control que permita regular tanto la velocidad de rotación como el ángulo de giro de un motor de continua mediante un microprocesador ...
Mostrando ítems 1-20 de 49

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
