


Listar por palabra clave "Control adaptativo"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por palabra clave
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por palabra clave "Control adaptativo"
Mostrando ítems 1-15 de 15
-
 Pataro, Igor M. L.; D. Gil, Juan; Guzmán, José L.; M. Lemos, João (Universitat Politècnica de València, 2023-11-08)[EN] This paper proposes an adaptive tuning method for the Linear-Quadratic FeedForward (LQ-FF) optimal controller. The procedure aims to reject disturbances while maintaining the reference tracking performance of the ...
Pataro, Igor M. L.; D. Gil, Juan; Guzmán, José L.; M. Lemos, João (Universitat Politècnica de València, 2023-11-08)[EN] This paper proposes an adaptive tuning method for the Linear-Quadratic FeedForward (LQ-FF) optimal controller. The procedure aims to reject disturbances while maintaining the reference tracking performance of the ... -
 Prian Rodríguez, Manuel; López Sánchez, Manuel J.; Moreno Verdulla, J. Francisco (Universitat Politècnica de València, 2015-04-12)[ES] En este trabajo, se propone un método de control híbrido adaptativo, que estabiliza sistemas caóticos en la vecindad de órbitas periódicas inestables embebidas en atractores extraños. El método está basado en la acción ...
Prian Rodríguez, Manuel; López Sánchez, Manuel J.; Moreno Verdulla, J. Francisco (Universitat Politècnica de València, 2015-04-12)[ES] En este trabajo, se propone un método de control híbrido adaptativo, que estabiliza sistemas caóticos en la vecindad de órbitas periódicas inestables embebidas en atractores extraños. El método está basado en la acción ... -
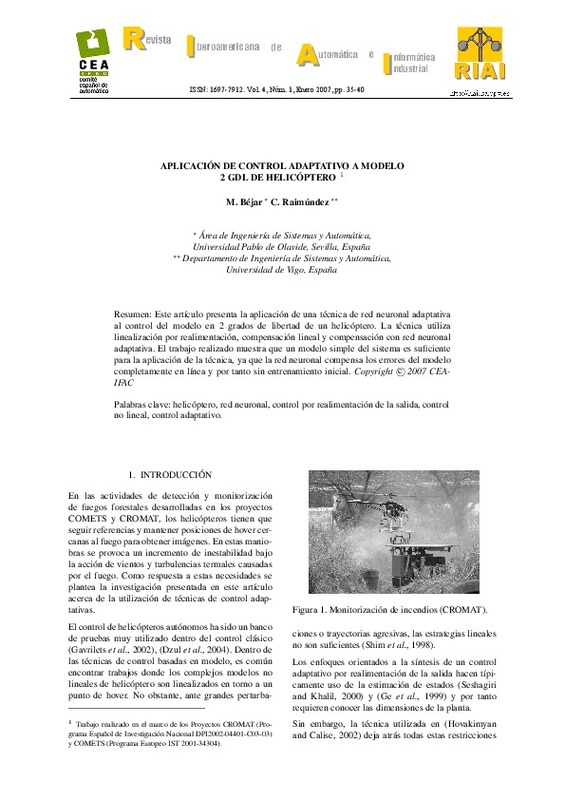 Béjar, M.; Raimúndez, C. (Universitat Politècnica de València, 2009-12-02)[ES] Este artículo presenta la aplicación de una técnica de red neuronal adaptativa al control del modelo en 2 grados de libertad de un helicóptero. La técnica utiliza linealización por realimentación, compensación lineal ...
Béjar, M.; Raimúndez, C. (Universitat Politècnica de València, 2009-12-02)[ES] Este artículo presenta la aplicación de una técnica de red neuronal adaptativa al control del modelo en 2 grados de libertad de un helicóptero. La técnica utiliza linealización por realimentación, compensación lineal ... -
 Travieso-Torres, Juan Carlos; Duarte-Mermoud, Manuel A.; Gutiérrez-Osorio, Antonio; Beytía, Orlando (Universitat Politècnica de València, 2018-03-05)[ES] En este artículo científico se proponen dos estrategias de control basado en pasividad, una adaptable y la otra no adaptable para cierta clase de sistemas no lineales. A diferencia de la estrategia de control no ...
Travieso-Torres, Juan Carlos; Duarte-Mermoud, Manuel A.; Gutiérrez-Osorio, Antonio; Beytía, Orlando (Universitat Politècnica de València, 2018-03-05)[ES] En este artículo científico se proponen dos estrategias de control basado en pasividad, una adaptable y la otra no adaptable para cierta clase de sistemas no lineales. A diferencia de la estrategia de control no ... -
 Muñoz, V. F.; García Morales, I.; Pérez del Pulgar, C.; Gómez de Gabriel, J. M.; Fernández Lozano, J. J.; García Cerezo, A.; Vara, C.; Toscano, R. (Universitat Politècnica de València, 2009-12-03)[EN] This paper is focuses on the motion control applied to a cameraman robotic assistant for minimally invasive surgery. In particular, this paper is devoted to the camera navigation problem refered to robots endowed with ...
Muñoz, V. F.; García Morales, I.; Pérez del Pulgar, C.; Gómez de Gabriel, J. M.; Fernández Lozano, J. J.; García Cerezo, A.; Vara, C.; Toscano, R. (Universitat Politècnica de València, 2009-12-03)[EN] This paper is focuses on the motion control applied to a cameraman robotic assistant for minimally invasive surgery. In particular, this paper is devoted to the camera navigation problem refered to robots endowed with ... -
 González de la Vara, Ángel (Universitat Politècnica de València, 2019-07-22)[ES] El objetivo principal es explorar diferentes enfoques de control longitudinal en una aeronave a subescala con un conjunto definido de sensores, así como desarrollar e implementar prácticamente un método de control adecuado.
González de la Vara, Ángel (Universitat Politècnica de València, 2019-07-22)[ES] El objetivo principal es explorar diferentes enfoques de control longitudinal en una aeronave a subescala con un conjunto definido de sensores, así como desarrollar e implementar prácticamente un método de control adecuado. -
 Cazalilla Morenas, Jose Ignacio (Universitat Politècnica de València, 2017-09-01)In this thesis, using techniques related to component-based software engineering, a variety of advanced controllers for a parallel robot of 3 degrees of freedom have been developed in a modular way. A novel and a complete ...
Cazalilla Morenas, Jose Ignacio (Universitat Politècnica de València, 2017-09-01)In this thesis, using techniques related to component-based software engineering, a variety of advanced controllers for a parallel robot of 3 degrees of freedom have been developed in a modular way. A novel and a complete ... -
 Ruiz Riquelme, Daniel (Universitat Politècnica de València, 2017-01-13)[EN] exogenous insulin is realisable, there are a lot of external factors that makes difficult for patients to manage their glucose levels. Several achievements in continuous subcutaneous insulin infusion (CSII) and ...
Ruiz Riquelme, Daniel (Universitat Politècnica de València, 2017-01-13)[EN] exogenous insulin is realisable, there are a lot of external factors that makes difficult for patients to manage their glucose levels. Several achievements in continuous subcutaneous insulin infusion (CSII) and ... -
Bouzada Fernández, Lara (Universitat Politècnica de València, 2023-09-14)[ES] Se propone la realización de un TFG en el que se desarrollarán algoritmos aplicados a procesado de señal con un perfil de ejecución en paralelo utilizando tecnologías implementadas en placas de computación embebida; ...
-
 Prian Rodríguez, Manuel; López Sánchez, Manuel J.; Moreno Verdulla, J. Francisco (Universitat Politècnica de València, 2017-12-05)[ES] En este trabajo se propone un sistema de control equivalente a un método numérico para el cálculo de los puntos de equilibrio de sistemas dinámicos, donde dichos equilibrios pueden ser empleados como señal de referencia ...
Prian Rodríguez, Manuel; López Sánchez, Manuel J.; Moreno Verdulla, J. Francisco (Universitat Politècnica de València, 2017-12-05)[ES] En este trabajo se propone un sistema de control equivalente a un método numérico para el cálculo de los puntos de equilibrio de sistemas dinámicos, donde dichos equilibrios pueden ser empleados como señal de referencia ... -
 Sala Piqueras, Antonio (Universitat Politècnica de València, 2019-02-13)Motivación y planteamiento del problema de mínimos cuadrados recursivos lineales, posibles aplicaciones. Revisión de fórmula de mejor predicción lineal covarianza*inversa(varianza_info) --su comprensión se considera ...
Sala Piqueras, Antonio (Universitat Politècnica de València, 2019-02-13)Motivación y planteamiento del problema de mínimos cuadrados recursivos lineales, posibles aplicaciones. Revisión de fórmula de mejor predicción lineal covarianza*inversa(varianza_info) --su comprensión se considera ... -
 Sala Piqueras, Antonio (Universitat Politècnica de València, 2019-02-13)Este vídeo aborda los mínimos cuadrados recursivos, con factor de olvido exponencial o con filtro de Kalman con dinámica y ruido en los parámetros (no constantes). Primero aborda una motivacio¿n a la identificacio¿n de ...
Sala Piqueras, Antonio (Universitat Politècnica de València, 2019-02-13)Este vídeo aborda los mínimos cuadrados recursivos, con factor de olvido exponencial o con filtro de Kalman con dinámica y ruido en los parámetros (no constantes). Primero aborda una motivacio¿n a la identificacio¿n de ... -
 Pandey, Varun (Universitat Politècnica de València, 2021-10-04)[ES] La necesidad de mejorar el consumo de combustible y las emisiones de los sistemas propulsivos de automoción en condiciones reales de conducción es la base de esta tesis. Para ello, se exploran dos ejes: En primer lugar, ...
Pandey, Varun (Universitat Politècnica de València, 2021-10-04)[ES] La necesidad de mejorar el consumo de combustible y las emisiones de los sistemas propulsivos de automoción en condiciones reales de conducción es la base de esta tesis. Para ello, se exploran dos ejes: En primer lugar, ... -
Ruiz Riquelme, Daniel (2022-04-01)[ES] En este trabajo final de grado se ha diseñado un esquema de control adaptativo con el objetivo principal de limitar de forma automática la cantidad de eventos hipoglucémicos debidos a la variabilidad que sufre el ...
-
 Bilbao Moreno, Daniel; Ferrer Uriarte, Unai; Viñals Abelan, Jose Javier; Guerra Franco, Gonzalo; Irigoyen Gordo, Eloy; Cabanes Axpe, Itziar (Universitat Politècnica de València, 2023-04-18)[EN] In order to perform in-orbit servicing tasks autonomously and without the need for human personnel, this work presents the development of a self-coupling robotic system based on cameras and visual markers that allow ...
Bilbao Moreno, Daniel; Ferrer Uriarte, Unai; Viñals Abelan, Jose Javier; Guerra Franco, Gonzalo; Irigoyen Gordo, Eloy; Cabanes Axpe, Itziar (Universitat Politècnica de València, 2023-04-18)[EN] In order to perform in-orbit servicing tasks autonomously and without the need for human personnel, this work presents the development of a self-coupling robotic system based on cameras and visual markers that allow ...
Mostrando ítems 1-15 de 15

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
