


Listar por palabra clave "Control no lineal"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por palabra clave
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por palabra clave "Control no lineal"
Mostrando ítems 1-20 de 23
-
 Béjar, M.; Raimúndez, C. (Universitat Politècnica de València, 2009-12-02)[ES] Este artículo presenta la aplicación de una técnica de red neuronal adaptativa al control del modelo en 2 grados de libertad de un helicóptero. La técnica utiliza linealización por realimentación, compensación lineal ...
Béjar, M.; Raimúndez, C. (Universitat Politècnica de València, 2009-12-02)[ES] Este artículo presenta la aplicación de una técnica de red neuronal adaptativa al control del modelo en 2 grados de libertad de un helicóptero. La técnica utiliza linealización por realimentación, compensación lineal ... -
 Aplicación de técnicas multi-objetivo para el diseño de sistemas de control en aeronaves tipo A320 Font Vila, Rosa (Universitat Politècnica de València, 2018-07-30)El principal objetivo de este proyecto es aplicar técnicas de optimización al diseño de la ley de control que rige el aterrizaje de un A320. Actualmente, los pilotos automáticos aún no están certificados para volar en ...
Aplicación de técnicas multi-objetivo para el diseño de sistemas de control en aeronaves tipo A320 Font Vila, Rosa (Universitat Politècnica de València, 2018-07-30)El principal objetivo de este proyecto es aplicar técnicas de optimización al diseño de la ley de control que rige el aterrizaje de un A320. Actualmente, los pilotos automáticos aún no están certificados para volar en ... -
 Rodríguez, Federico; Garrido, Daniel Oscar; Núñez, Rubén Orlando; Oggier, Germán Gustavo; García, Guillermo Oscar (Universitat Politècnica de València, 2023-01-23)[ES] Este trabajo presenta una estrategia de control basada en la técnica de linealización por realimentación para regular la tensión a bornes de una carga de potencia constante alimentada por un Convertidor con Puentes ...
Rodríguez, Federico; Garrido, Daniel Oscar; Núñez, Rubén Orlando; Oggier, Germán Gustavo; García, Guillermo Oscar (Universitat Politècnica de València, 2023-01-23)[ES] Este trabajo presenta una estrategia de control basada en la técnica de linealización por realimentación para regular la tensión a bornes de una carga de potencia constante alimentada por un Convertidor con Puentes ... -
 Santos Navarro, Fernando Nóbel (Universitat Politècnica de València, 2016-12-28)[ES] A efectos de maximizar el rendimiento y productividad de los bioprocesos, la biotecnología industrial actual ha de hacer frente a problemas críticos, como son el modelado, la estimación de variables clave, y el ...
Santos Navarro, Fernando Nóbel (Universitat Politècnica de València, 2016-12-28)[ES] A efectos de maximizar el rendimiento y productividad de los bioprocesos, la biotecnología industrial actual ha de hacer frente a problemas críticos, como son el modelado, la estimación de variables clave, y el ... -
 Rossomando, Francisco G.; Soria, Carlos; Carelli, Ricardo (Universitat Politècnica de València, 2010-10-08)[ES] En este trabajo se presenta un control de seguimiento de trayectorias de robots móviles. La estructura de control propuesta combina una linealización por realimentación basada en el modelo cinemático nominal, y una ...
Rossomando, Francisco G.; Soria, Carlos; Carelli, Ricardo (Universitat Politècnica de València, 2010-10-08)[ES] En este trabajo se presenta un control de seguimiento de trayectorias de robots móviles. La estructura de control propuesta combina una linealización por realimentación basada en el modelo cinemático nominal, y una ... -
 Fernández, R.; Aracil, R.; Armada, M. (Universitat Politècnica de València, 2012-10-14)[ES] En este trabajo se presenta una solución para mejorar el rendimiento de los robots móviles con ruedas que se desplacen sobre superficies con un bajo coeficiente de fricción estática. En estas circunstancias, los robots ...
Fernández, R.; Aracil, R.; Armada, M. (Universitat Politècnica de València, 2012-10-14)[ES] En este trabajo se presenta una solución para mejorar el rendimiento de los robots móviles con ruedas que se desplacen sobre superficies con un bajo coeficiente de fricción estática. En estas circunstancias, los robots ... -
 García, Diego; Sandoval, Jesús; Gutiérrez–Jagüey, Joaquín; Bugarin, Eusebio (Universitat Politècnica de València, 2017-12-05)[ES] En este trabajo se presenta el diseño de un IDA-PBC (Interconnection and Damping Assignment-Passivity Based Control) para la regulación de un vehículo submarino subactuado. Se consideran seis grados de libertad y ...
García, Diego; Sandoval, Jesús; Gutiérrez–Jagüey, Joaquín; Bugarin, Eusebio (Universitat Politècnica de València, 2017-12-05)[ES] En este trabajo se presenta el diseño de un IDA-PBC (Interconnection and Damping Assignment-Passivity Based Control) para la regulación de un vehículo submarino subactuado. Se consideran seis grados de libertad y ... -
 Saludes Rodil, Sergio; Fuente, M. J. (Universitat Politècnica de València, 2009-12-02)[ES] Este artículo trata sobre el control IMC no lineal y un método para hacerlo tolerante a los fallos en la planta. El control IMC no lineal se consigue por medio de modelos no lineales de la planta y de la inversa de ...
Saludes Rodil, Sergio; Fuente, M. J. (Universitat Politècnica de València, 2009-12-02)[ES] Este artículo trata sobre el control IMC no lineal y un método para hacerlo tolerante a los fallos en la planta. El control IMC no lineal se consigue por medio de modelos no lineales de la planta y de la inversa de ... -
 Vacca Sisterna, Carlos; Serrano, Emanuel; Scaglia, Gustavo; Rossomando, Francisco (Universitat Politècnica de València, 2021-12-17)[EN] This work proposes the design of an adaptive controller for a marine vessel; the proposed control strategy applies a controller designed on linear algebra for the kinematics and an adaptive control technique for the ...
Vacca Sisterna, Carlos; Serrano, Emanuel; Scaglia, Gustavo; Rossomando, Francisco (Universitat Politècnica de València, 2021-12-17)[EN] This work proposes the design of an adaptive controller for a marine vessel; the proposed control strategy applies a controller designed on linear algebra for the kinematics and an adaptive control technique for the ... -
 Blasco Ferragud, Francesc Xavier (Universitat Politècnica de València, 2012-06-06)La Tesis Doctoral se fundamenta, principalmente, en la exploración de nuevos métodos de Control Predictivo Basado en Modelos (MBPC) mediante la incorporación de herramientas de optimización heurística y las mejoras en las ...
Blasco Ferragud, Francesc Xavier (Universitat Politècnica de València, 2012-06-06)La Tesis Doctoral se fundamenta, principalmente, en la exploración de nuevos métodos de Control Predictivo Basado en Modelos (MBPC) mediante la incorporación de herramientas de optimización heurística y las mejoras en las ... -
 Soria, Carlos; Roberti, Flavio; Carelli, Ricardo; Sebastián, José M. (Universitat Politècnica de València, 2008-10-10)[EN] In this work a visual servo control based on the passivity properties of the visual system is designed. It proposes a regulator with variable control gains, to avoid the saturations of the actuators while introducing ...
Soria, Carlos; Roberti, Flavio; Carelli, Ricardo; Sebastián, José M. (Universitat Politècnica de València, 2008-10-10)[EN] In this work a visual servo control based on the passivity properties of the visual system is designed. It proposes a regulator with variable control gains, to avoid the saturations of the actuators while introducing ... -
 Berna Ferri, Andreu (Universitat Politècnica de València, 2011-07-22)En esta tesina, se presenta una nueva plataforma de tiempo real para el desarrollo y validación de algoritmos de control de vehículos aéreos no tripulados. Se dispone de dos plataformas un quad-rotor fijo sobre un eje y ...
Berna Ferri, Andreu (Universitat Politècnica de València, 2011-07-22)En esta tesina, se presenta una nueva plataforma de tiempo real para el desarrollo y validación de algoritmos de control de vehículos aéreos no tripulados. Se dispone de dos plataformas un quad-rotor fijo sobre un eje y ... -
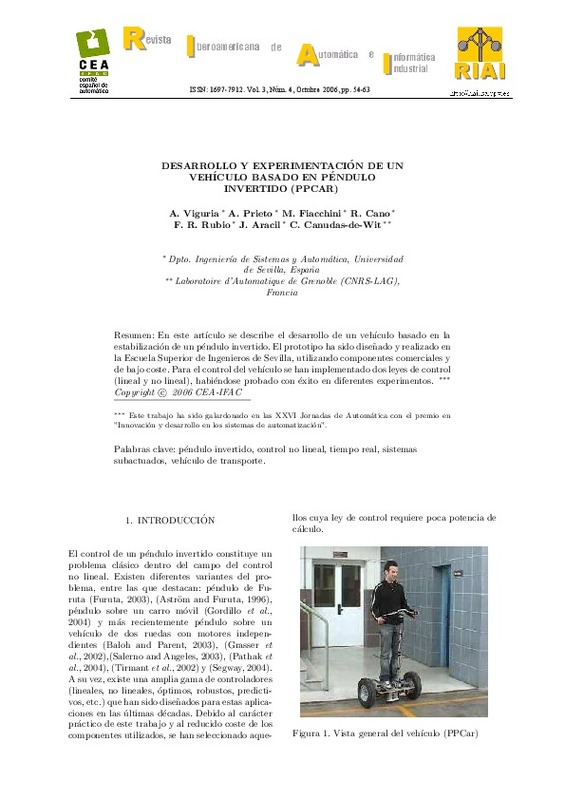 Viguria, A.; Prieto, A.; Fiacchini, M.; Cano, R.; Rubio, F. R.; Aracil, J.; Canudas-de-Wit, C. (Universitat Politècnica de València, 2009-12-03)[EN] This paper describes the development of a vehicle based on the stabilization of an inverted pendulum. The prototype has been designed and developed by the School of Engineering of Seville using commercial and low-cost ...
Viguria, A.; Prieto, A.; Fiacchini, M.; Cano, R.; Rubio, F. R.; Aracil, J.; Canudas-de-Wit, C. (Universitat Politècnica de València, 2009-12-03)[EN] This paper describes the development of a vehicle based on the stabilization of an inverted pendulum. The prototype has been designed and developed by the School of Engineering of Seville using commercial and low-cost ... -
 Tafur, Julio C.; García, Cecilia E.; Aracil, Rafael; Saltarén, Roque (Elsevier, 2014-10-05)[EN] This article presents a novel control scheme for bilateral teleoperation of n degree-of-freedom (DOF) nonlinear robotic systems with time-varying communication delay.The bilateral control of the teleoperator system ...
Tafur, Julio C.; García, Cecilia E.; Aracil, Rafael; Saltarén, Roque (Elsevier, 2014-10-05)[EN] This article presents a novel control scheme for bilateral teleoperation of n degree-of-freedom (DOF) nonlinear robotic systems with time-varying communication delay.The bilateral control of the teleoperator system ... -
Duomarco Barbosa, Luis Sebastián (Universitat Politècnica de València, 2024-09-03)[ES] Los biorreactores de pequeña escala y bajo coste se han convertido en una de las herramientas fundamentales para el prototipado y caracterización de construcciones genéticas sintéticas en el ámbito de la biotecnología ...
-
 Kunusch, Cristian; Puleston, Paul F.; Mayosky, Miguel A. (Universitat Politècnica de València, 2008-07-09)[EN] In this work, a comparative study of three different second order sliding mode algorithms is performed. These controllers are used to solve the breathing problem of a PEM fuel cell stack. The designed algorithms are ...
Kunusch, Cristian; Puleston, Paul F.; Mayosky, Miguel A. (Universitat Politècnica de València, 2008-07-09)[EN] In this work, a comparative study of three different second order sliding mode algorithms is performed. These controllers are used to solve the breathing problem of a PEM fuel cell stack. The designed algorithms are ... -
Cano Mancebo, Javier (Universitat Politècnica de València, 2015-10-19)[EN] This work will propose first to study and analyze different models of friction. Further, the identification of the models of friction parameters will be done. Finally, different nonlinear controllers that are able to ...
-
 Cerrada Collado, Cristina; Chaos García, Dictino; Moreno-Salinas, David; Aranda Almansa, Joaquín (Universitat Politècnica de València, 2023-09-29)[EN] The present paper presents a optimization problem of a control law to minimize the integral square error produced by driving an AUV (Autonomous Underwater Vehicle) using a single thruster from a start point to a desired ...
Cerrada Collado, Cristina; Chaos García, Dictino; Moreno-Salinas, David; Aranda Almansa, Joaquín (Universitat Politècnica de València, 2023-09-29)[EN] The present paper presents a optimization problem of a control law to minimize the integral square error produced by driving an AUV (Autonomous Underwater Vehicle) using a single thruster from a start point to a desired ... -
 Sala Piqueras, Antonio (Universitat Politècnica de València, 2020-02-14)Este vídeo discute la linealización y desacoplamiento por realimentación del estado en un tanque de mezclado (mediante elementos no lineales, al ser el proceso no lineal). El primer minuto y medio en el vídeo aquí ...
Sala Piqueras, Antonio (Universitat Politècnica de València, 2020-02-14)Este vídeo discute la linealización y desacoplamiento por realimentación del estado en un tanque de mezclado (mediante elementos no lineales, al ser el proceso no lineal). El primer minuto y medio en el vídeo aquí ... -
 Martinez Salamero, L.; Cid Pastor, A.; El Aroudi, A.; Giral, R.; Calvente, Javier (Universitat Politècnica de València, 2009-10-08)[ES] En este trabajo se presenta de forma tutorial los conceptos básicos de modelado y control de convertidores conmutados continua-continua. Tras definir la Electrónica de Potencia y su dominio de utilización, se presenta ...
Martinez Salamero, L.; Cid Pastor, A.; El Aroudi, A.; Giral, R.; Calvente, Javier (Universitat Politècnica de València, 2009-10-08)[ES] En este trabajo se presenta de forma tutorial los conceptos básicos de modelado y control de convertidores conmutados continua-continua. Tras definir la Electrónica de Potencia y su dominio de utilización, se presenta ...
Mostrando ítems 1-20 de 23

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
