


Listar por palabra clave "Control por computador"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por palabra clave
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por palabra clave "Control por computador"
Mostrando ítems 1-15 de 15
-
 Sánchez Izquierdo, Héctor (Universitat Politècnica de València, 2015-07-28)[ES] En el presente trabajo de fin del Grado de Ingeniería en Tecnologías Industriales se ha desarrollado un sistema de control de posición y movimiento de robots utilizando marcadores detectados mediante visión ...
Sánchez Izquierdo, Héctor (Universitat Politècnica de València, 2015-07-28)[ES] En el presente trabajo de fin del Grado de Ingeniería en Tecnologías Industriales se ha desarrollado un sistema de control de posición y movimiento de robots utilizando marcadores detectados mediante visión ... -
 Fortaleza Lobillo, Andrés (Universitat Politècnica de València, 2019-09-23)[ES] En los últimos años el control de robots en general y la navegación de robots móviles en particular es un área de interés para investigadores y desarrolladores industriales. En el presente Trabajo Fin de Grado (TFG) ...
Fortaleza Lobillo, Andrés (Universitat Politècnica de València, 2019-09-23)[ES] En los últimos años el control de robots en general y la navegación de robots móviles en particular es un área de interés para investigadores y desarrolladores industriales. En el presente Trabajo Fin de Grado (TFG) ... -
Company Arnalte, Miguel (Universitat Politècnica de València, 2015-07-23)[ES] El presente TFG se enmarca dentro del área correspondiente al uso de robots con fines terapéuticos, en concreto, para la rehabilitación de miembros inferiores. Para ello, se dispone de un robot paralelo de 3 grados ...
-
 Valera Fernández, Ángel; Benimeli Andreu, Francesc Xavier; Solaz, J.; De Rosario, H.; Robertsson, A.; Nilsson, K.; Zotovic Stanisic, Ranko; Mellado Arteche, Martín (Universitat Politècnica de València, 2009-04-07)[EN] In this work the design of an experimental test platform for analysis of the mechanical behavior of car seats during passenger ingress and egress is presented. This development has been performed in two steps: the ...
Valera Fernández, Ángel; Benimeli Andreu, Francesc Xavier; Solaz, J.; De Rosario, H.; Robertsson, A.; Nilsson, K.; Zotovic Stanisic, Ranko; Mellado Arteche, Martín (Universitat Politècnica de València, 2009-04-07)[EN] In this work the design of an experimental test platform for analysis of the mechanical behavior of car seats during passenger ingress and egress is presented. This development has been performed in two steps: the ... -
Kubiliüté, Gabrielé (Universitat Politècnica de València, 2019-04-15)[ES] El objetivo principal de la presente propuesta de Trabajo Fin de Máster es el desarrollo de un sistema de detección y evasión de colisiones en trayectorias situadas en el espacio tridimensional. Para ello se aborda y ...
-
Torres Ruiz, Àngel (Universitat Politècnica de València, 2015-10-15)[ES] En el presente Trabajo Fin de Grado se propone desarrollar un manipulador de 3 grados de libertad (movimientos en los ejes X-Y-Z) para controlar la posición de una sonda Hall. Dicha sonda se utilizará para la medición ...
-
Ferrer Pastor, Gonzalo (Universitat Politècnica de València, 2015-07-28)[ES] En el presente Trabajo Fin de Grado se propone trabajar con técnicas de aprendizaje Machine Learning en el control de sistemas robotizados. Mediante estas técnicas se pueden obtener los pesos de funciones gausianas ...
-
Uriel Cárcel, Álvaro (Universitat Politècnica de València, 2015-07-21)[ES] El objeto y alcance de este proyecto reside en el desarrollo de un interfaz cerebro-computador, enfocado al control de posición de un cilindro neumático lineal, y accionamiento de una pinza neumática, también acoplada ...
-
 ESTUDI I MODELAT D'UNA PLATAFORMA ROBÒTICA TIPUS EXOSQUELET. CONTROL AUTOMÀTIC DEL PES DEL PACIENT Martínez Beseler, Xavier (Universitat Politècnica de València, 2015-09-24)[ES] En el presente trabajo final de grado se propone trabajar con una plataforma robótica tipo exosqueleto. La plataforma está compuesta por dos actuadores (un motor eléctrico y uno hidráulico) y tres sensores: una célula ...
ESTUDI I MODELAT D'UNA PLATAFORMA ROBÒTICA TIPUS EXOSQUELET. CONTROL AUTOMÀTIC DEL PES DEL PACIENT Martínez Beseler, Xavier (Universitat Politècnica de València, 2015-09-24)[ES] En el presente trabajo final de grado se propone trabajar con una plataforma robótica tipo exosqueleto. La plataforma está compuesta por dos actuadores (un motor eléctrico y uno hidráulico) y tres sensores: una célula ... -
 Vicente Cánovas, Ángel (Universitat Politècnica de València, 2021-01-28)[ES] Motivado por lo que se conoce como Industria 4.0, recientemente el control de robots manipuladores y móviles es un área de interés para investigadores y desarrolladores industriales. La robótica va a detonar un ...
Vicente Cánovas, Ángel (Universitat Politècnica de València, 2021-01-28)[ES] Motivado por lo que se conoce como Industria 4.0, recientemente el control de robots manipuladores y móviles es un área de interés para investigadores y desarrolladores industriales. La robótica va a detonar un ... -
 Martínez Martínez, Abel (Universitat Politècnica de València, 2015-10-21)[EN] This paper proposes to modify the control unit of 3D printers to improve the performance of such systems. For this, step by step motors will be replaced with DC motors equipped with encoders. Further, a parametric ...
Martínez Martínez, Abel (Universitat Politècnica de València, 2015-10-21)[EN] This paper proposes to modify the control unit of 3D printers to improve the performance of such systems. For this, step by step motors will be replaced with DC motors equipped with encoders. Further, a parametric ... -
 Rosillo, N.; Valera Fernández, Ángel; Benimeli Andreu, Francesc Xavier; Mata Amela, Vicente; Valero Chuliá, Francisco José (Universitat Politècnica de València, 2010-04-09)[ES] Este trabajo presenta el desarrollo y la validación de una metodología que permite el modelado y la identificación de los parámetros dinámicos de robots manipuladores. La ecuación dinámica del robot está basada en la ...
Rosillo, N.; Valera Fernández, Ángel; Benimeli Andreu, Francesc Xavier; Mata Amela, Vicente; Valero Chuliá, Francisco José (Universitat Politècnica de València, 2010-04-09)[ES] Este trabajo presenta el desarrollo y la validación de una metodología que permite el modelado y la identificación de los parámetros dinámicos de robots manipuladores. La ecuación dinámica del robot está basada en la ... -
Sánchez Martínez, Virginia (Universitat Politècnica de València, 2015-07-28)[ES] En este trabajo se aborda el estudio del control del movimiento de robots móviles, más en concreto se desarrollan tareas relacionadas con la evitación de obstáculos y su aplicación en el seguimiento de pasillos y ...
-
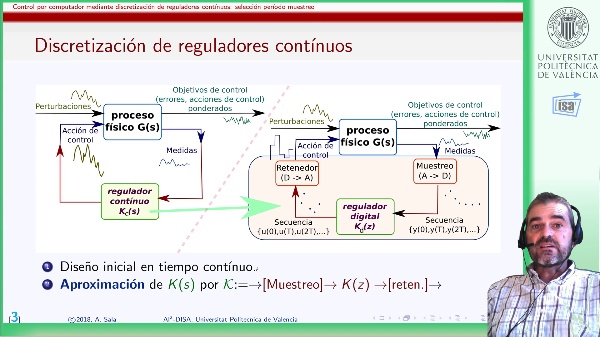 Sala Piqueras, Antonio (Universitat Politècnica de València, 2021-06-09)En este vídeo se discuten criterios específicos para la selección del período de muestreo en reguladores digitales obtenidos a partir de discretización de reguladores contínuos preexistentes. Se realiza un análisis ...
Sala Piqueras, Antonio (Universitat Politècnica de València, 2021-06-09)En este vídeo se discuten criterios específicos para la selección del período de muestreo en reguladores digitales obtenidos a partir de discretización de reguladores contínuos preexistentes. Se realiza un análisis ... -
 Valera, A.; Vallés, M.; Díez, J. L. (Universitat Politècnica de València, 2010-09-30)[ES] Este trabajo propone una solución, mediante aplicaciones basadas en Matlab para el desarrollo de laboratorios virtuales y remotos, a los problemas que se suelen plantear con las sesiones de prácticas de laboratorio ...
Valera, A.; Vallés, M.; Díez, J. L. (Universitat Politècnica de València, 2010-09-30)[ES] Este trabajo propone una solución, mediante aplicaciones basadas en Matlab para el desarrollo de laboratorios virtuales y remotos, a los problemas que se suelen plantear con las sesiones de prácticas de laboratorio ...
Mostrando ítems 1-15 de 15

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
