


Listar por palabra clave "Control robusto"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por palabra clave
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por palabra clave "Control robusto"
Mostrando ítems 1-20 de 22
-
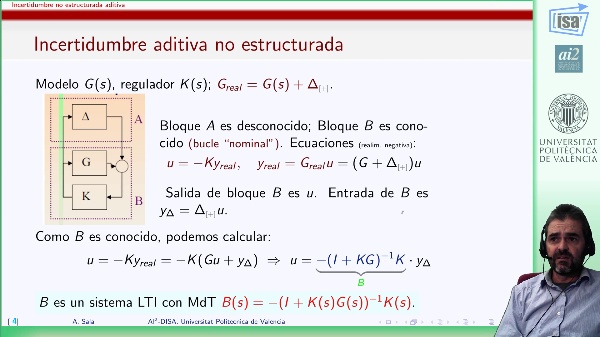 Sala Piqueras, Antonio (Universitat Politècnica de València, 2017-11-28)Este objeto de aprendizaje describe cómo utilizar el teorema de pequeña ganancia para determinar el margen de estabilidad de un controlador prefijado ante incertidumbre aditiva no estructurada (análisis de estabilidad robusta).
Sala Piqueras, Antonio (Universitat Politècnica de València, 2017-11-28)Este objeto de aprendizaje describe cómo utilizar el teorema de pequeña ganancia para determinar el margen de estabilidad de un controlador prefijado ante incertidumbre aditiva no estructurada (análisis de estabilidad robusta). -
 Muñoz Mansilla, R.; Aranda, J.; Díaz, J.M.; Chaos, D. (Elsevier, 2012-07-08)[ES] En este trabajo se realiza un análisis de diferentes metodologías de control robusto basadas en la técnica denominada Teoría de la Realimentación Cuantitativa, QFT (Quantitative Feedback Theory) para resolver diferentes ...
Muñoz Mansilla, R.; Aranda, J.; Díaz, J.M.; Chaos, D. (Elsevier, 2012-07-08)[ES] En este trabajo se realiza un análisis de diferentes metodologías de control robusto basadas en la técnica denominada Teoría de la Realimentación Cuantitativa, QFT (Quantitative Feedback Theory) para resolver diferentes ... -
 Gutiérrez Giles, Alejandro; Arteaga Pérez, Marco A.; Sira Ramírez, Hebertt (Elsevier, 2016-04-06)[EN] In this work the design of a linear observer–linear controller robust output feedback scheme is introduced for simultaneous trajectory tracking of position and force in fully actuated robot manipulators. The unknown ...
Gutiérrez Giles, Alejandro; Arteaga Pérez, Marco A.; Sira Ramírez, Hebertt (Elsevier, 2016-04-06)[EN] In this work the design of a linear observer–linear controller robust output feedback scheme is introduced for simultaneous trajectory tracking of position and force in fully actuated robot manipulators. The unknown ... -
 Guerrero Ramírez, Esteban Osvaldo; Martínez Barbosa, Alberto; Guzmán Ramírez, Enrique; Linares Flores, Jesús; Sira Ramírez, Hebertt (Universitat Politècnica de València, 2018-06-22)[ES] El presente artículo documenta el diseño e implementación de un controlador robusto para el convertidor CD/CD Reductor–Paralelo, bajo la perspectiva de la planitud diferencial y la técnica del control por rechazo ...
Guerrero Ramírez, Esteban Osvaldo; Martínez Barbosa, Alberto; Guzmán Ramírez, Enrique; Linares Flores, Jesús; Sira Ramírez, Hebertt (Universitat Politècnica de València, 2018-06-22)[ES] El presente artículo documenta el diseño e implementación de un controlador robusto para el convertidor CD/CD Reductor–Paralelo, bajo la perspectiva de la planitud diferencial y la técnica del control por rechazo ... -
 Vinagre, Blas M.; Feliu Batlle, Vicente; Tejado, Inés (Universitat Politècnica de València, 2016-07-10)[ES] El objetivo del presente tutorial de control fraccionario es presentar los fundamentos de esta disciplina y las principales herramientas computacionales disponibles para su uso y aplicación por parte del ingeniero de ...
Vinagre, Blas M.; Feliu Batlle, Vicente; Tejado, Inés (Universitat Politècnica de València, 2016-07-10)[ES] El objetivo del presente tutorial de control fraccionario es presentar los fundamentos de esta disciplina y las principales herramientas computacionales disponibles para su uso y aplicación por parte del ingeniero de ... -
 López-Martínez, Manuel; Ortega, Manuel G.; Vivas, Carlos; Rubio, Francisco R. (Universitat Politècnica de València, 2009-12-02)[EN] This paper presents the design of a robust nonlinear controller for a scaled helicopter. This device features rotors with fixed angles of attack blades, and is controlled by changing the speed of the rotors using two ...
López-Martínez, Manuel; Ortega, Manuel G.; Vivas, Carlos; Rubio, Francisco R. (Universitat Politècnica de València, 2009-12-02)[EN] This paper presents the design of a robust nonlinear controller for a scaled helicopter. This device features rotors with fixed angles of attack blades, and is controlled by changing the speed of the rotors using two ... -
 Rascón, Raúl; Flores-Mendoza, Adrián; Moreno-Valenzuela, Javier; Aguilar-Avelar, Carlos (Universitat Politècnica de València, 2024-06-30)[EN] This article addresses Cartesian control for trajectory tracking of robot manipulators. The desired trajectories are proposed in Cartesian space. Through inverse kinematics, the desired trajectories in the joint space ...
Rascón, Raúl; Flores-Mendoza, Adrián; Moreno-Valenzuela, Javier; Aguilar-Avelar, Carlos (Universitat Politècnica de València, 2024-06-30)[EN] This article addresses Cartesian control for trajectory tracking of robot manipulators. The desired trajectories are proposed in Cartesian space. Through inverse kinematics, the desired trajectories in the joint space ... -
 Hidalgo, H.; Huerta, H. (Universitat Politècnica de València, 2021-04-06)[EN] In this paper, a control scheme to regulate the speed in an electric vehicle with two electric motors in the rear axle. In order to make a turn in the vehicle a differential speed in the motors is needed. A detailed ...
Hidalgo, H.; Huerta, H. (Universitat Politècnica de València, 2021-04-06)[EN] In this paper, a control scheme to regulate the speed in an electric vehicle with two electric motors in the rear axle. In order to make a turn in the vehicle a differential speed in the motors is needed. A detailed ... -
 Rascón, Raúl; Álvarez, Joaquín; Aguilar, Luis T. (Elsevier, 2014-07-06)[ES] Se presenta una estrategia de control que combina las técnicas de modos deslizantes y control H∞, para regular la posición de un sistema mecánico subactuado con fricción y con una holgura elástica. Se muestra que el ...
Rascón, Raúl; Álvarez, Joaquín; Aguilar, Luis T. (Elsevier, 2014-07-06)[ES] Se presenta una estrategia de control que combina las técnicas de modos deslizantes y control H∞, para regular la posición de un sistema mecánico subactuado con fricción y con una holgura elástica. Se muestra que el ... -
 Rosas Almeida, David Isaías; Cantú Cárdenas, Jesús Armando; Ocampo Díaz, Juan de Dios; Muñiz Valdez, Héctor (Universitat Politècnica de València, 2019-03-20)[EN] We propose a strategy to solve the tracking control problem for uncertain pneumatic systems and with partial state measurement. The strategy is based on the Active Disturbance Rejection Control structure (ADRC), which ...
Rosas Almeida, David Isaías; Cantú Cárdenas, Jesús Armando; Ocampo Díaz, Juan de Dios; Muñiz Valdez, Héctor (Universitat Politècnica de València, 2019-03-20)[EN] We propose a strategy to solve the tracking control problem for uncertain pneumatic systems and with partial state measurement. The strategy is based on the Active Disturbance Rejection Control structure (ADRC), which ... -
 Hoyo Sánchez, Ángeles; Guzmán Sánchez, José Luis; Moreno Úbeda, José Carlos; Baños Torrico, Alfonso (Universitat Politècnica de València, 2022-06-29)[EN] This work presents a first approach to the robust control of pH in a raceway photobioreactor for the cultivation of microalgae. In this type of process, pH is the most critical variable to control, having a direct ...
Hoyo Sánchez, Ángeles; Guzmán Sánchez, José Luis; Moreno Úbeda, José Carlos; Baños Torrico, Alfonso (Universitat Politècnica de València, 2022-06-29)[EN] This work presents a first approach to the robust control of pH in a raceway photobioreactor for the cultivation of microalgae. In this type of process, pH is the most critical variable to control, having a direct ... -
 Torres Solano, Alejandro (Universitat Politècnica de València, 2016-10-18)[ES] Recientemente, las centrales de ciclo combinado están cogiendo fuerza en el mercado de la producción de electricidad, ya que mejoran las antiguas y poco eficientes centrales térmicas, añadiendo un ciclo de vapor a ...
Torres Solano, Alejandro (Universitat Politècnica de València, 2016-10-18)[ES] Recientemente, las centrales de ciclo combinado están cogiendo fuerza en el mercado de la producción de electricidad, ya que mejoran las antiguas y poco eficientes centrales térmicas, añadiendo un ciclo de vapor a ... -
 Alazki, Hussain; Cortés-Vega, David; García, Pedro (Universitat Politècnica de València, 2023-09-21)[EN] Diatebes mellitus type 1 (T1DM) requires an strict control for insulin delivery to avoid severe consequences derived from hiperglycemia and hipoglycemia. The concept of an artificial pancreas allows the automation of ...
Alazki, Hussain; Cortés-Vega, David; García, Pedro (Universitat Politècnica de València, 2023-09-21)[EN] Diatebes mellitus type 1 (T1DM) requires an strict control for insulin delivery to avoid severe consequences derived from hiperglycemia and hipoglycemia. The concept of an artificial pancreas allows the automation of ... -
 Baquero-Suárez, Mauro; Cortes-Romero, John; Arcos-Legarda, Jaime; Coral-Enriquez, Horacio (Universitat Politècnica de València, 2017-12-05)[ES] Este trabajo propone una estrategia de Control por Rechazo Activo de Perturbaciones (ADRC), usando observadores extendidos de perturbación, para estabilizar una bicicleta en movimiento, sin conductor y con una velocidad ...
Baquero-Suárez, Mauro; Cortes-Romero, John; Arcos-Legarda, Jaime; Coral-Enriquez, Horacio (Universitat Politècnica de València, 2017-12-05)[ES] Este trabajo propone una estrategia de Control por Rechazo Activo de Perturbaciones (ADRC), usando observadores extendidos de perturbación, para estabilizar una bicicleta en movimiento, sin conductor y con una velocidad ... -
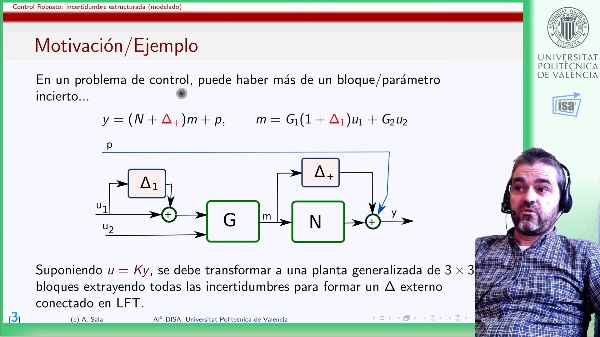 Sala Piqueras, Antonio (Universitat Politècnica de València, 2019-02-13)En este vídeo, como ejemplo introductorio de incertidumbre estructurada, se modela un sistema con dos bloques de incertidumbre: uno de ellos sobre uno de los dos actuadores que tiene el sistema, y otro bloque de incertumbre ...
Sala Piqueras, Antonio (Universitat Politècnica de València, 2019-02-13)En este vídeo, como ejemplo introductorio de incertidumbre estructurada, se modela un sistema con dos bloques de incertidumbre: uno de ellos sobre uno de los dos actuadores que tiene el sistema, y otro bloque de incertumbre ... -
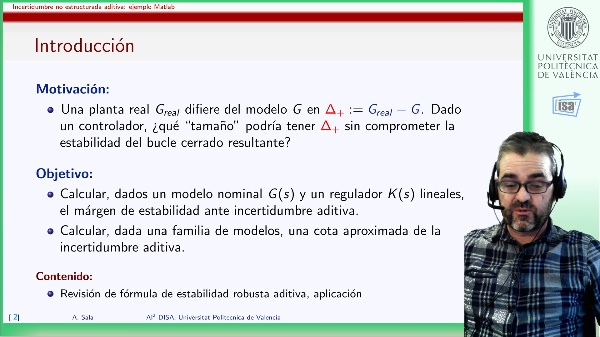 Sala Piqueras, Antonio (Universitat Politècnica de València, 2018-02-14)Este vídeo estima una cota de la incertidumbre aditiva en un proceso masa-muelle-amortiguador añadiendo dinámica de actuadores y de alta frecuencia, así como variando los parámetros físicos. Con dicha cota, se evalúa si ...
Sala Piqueras, Antonio (Universitat Politècnica de València, 2018-02-14)Este vídeo estima una cota de la incertidumbre aditiva en un proceso masa-muelle-amortiguador añadiendo dinámica de actuadores y de alta frecuencia, así como variando los parámetros físicos. Con dicha cota, se evalúa si ... -
 Sanz Díaz, Ricardo (Universitat Politècnica de València, 2018-10-30)Los sistemas con retardo temporal aparecen con frecuencia en el ámbito de la ingeniería, por ejemplo en transmisiones hidráulicas o mecánicas, procesos metalúrgicos o sistemas de control en red. Los retardos temporales han ...
Sanz Díaz, Ricardo (Universitat Politècnica de València, 2018-10-30)Los sistemas con retardo temporal aparecen con frecuencia en el ámbito de la ingeniería, por ejemplo en transmisiones hidráulicas o mecánicas, procesos metalúrgicos o sistemas de control en red. Los retardos temporales han ... -
 Carrillo Ahumada, J.; Reynoso Meza, G.; Sanchís Saez, Javier; García Nieto, S.; García Alvarado, M.A. (Universitat Politècnica de València, 2015-04-12)[ES] La sintonización de controladores Pareto-óptimo robustos ha sido empleada para mejorar el rendimiento de un helicóptero de dos grados de libertad con un algoritmo de control lineal. El procedimiento de sintonización ...
Carrillo Ahumada, J.; Reynoso Meza, G.; Sanchís Saez, Javier; García Nieto, S.; García Alvarado, M.A. (Universitat Politècnica de València, 2015-04-12)[ES] La sintonización de controladores Pareto-óptimo robustos ha sido empleada para mejorar el rendimiento de un helicóptero de dos grados de libertad con un algoritmo de control lineal. El procedimiento de sintonización ... -
 Cano Nistal, Pablo (Universitat Politècnica de València, 2018-01-10)El objetivo del trabajo consiste en dotar de robustez a estrategias de control clásicas (tanto para sistemas de control SISO como MIMO) agregando dos filtros en el lazo de control: un filtro en la referencia y otro filtro ...
Cano Nistal, Pablo (Universitat Politècnica de València, 2018-01-10)El objetivo del trabajo consiste en dotar de robustez a estrategias de control clásicas (tanto para sistemas de control SISO como MIMO) agregando dos filtros en el lazo de control: un filtro en la referencia y otro filtro ... -
 Rosas Almeida, D.I.; González Solis, E.V.; Raya Díaz, G. (Universitat Politècnica de València, 2021-07-01)[EN] We present a control strategy to guarantee the stability of teleoperation systems formed by mechanical systems of nDOF with parametric uncertainties, external disturbances, a partial measure of state vectors, and ...
Rosas Almeida, D.I.; González Solis, E.V.; Raya Díaz, G. (Universitat Politècnica de València, 2021-07-01)[EN] We present a control strategy to guarantee the stability of teleoperation systems formed by mechanical systems of nDOF with parametric uncertainties, external disturbances, a partial measure of state vectors, and ...
Mostrando ítems 1-20 de 22

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
