


Listar por palabra clave "Embedded system"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por palabra clave
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por palabra clave "Embedded system"
Mostrando ítems 1-20 de 22
-
 Rodríguez Pérez, Raúl (Universitat Politècnica de València, 2024-09-19)[ES] El presente trabajo fin de máster tiene como principal objetivo analizar la viabilidad de incorporar funcionalidades relacionadas con la detección y el reconocimiento facial en un videoportero comercial. En los ...
Rodríguez Pérez, Raúl (Universitat Politècnica de València, 2024-09-19)[ES] El presente trabajo fin de máster tiene como principal objetivo analizar la viabilidad de incorporar funcionalidades relacionadas con la detección y el reconocimiento facial en un videoportero comercial. En los ... -
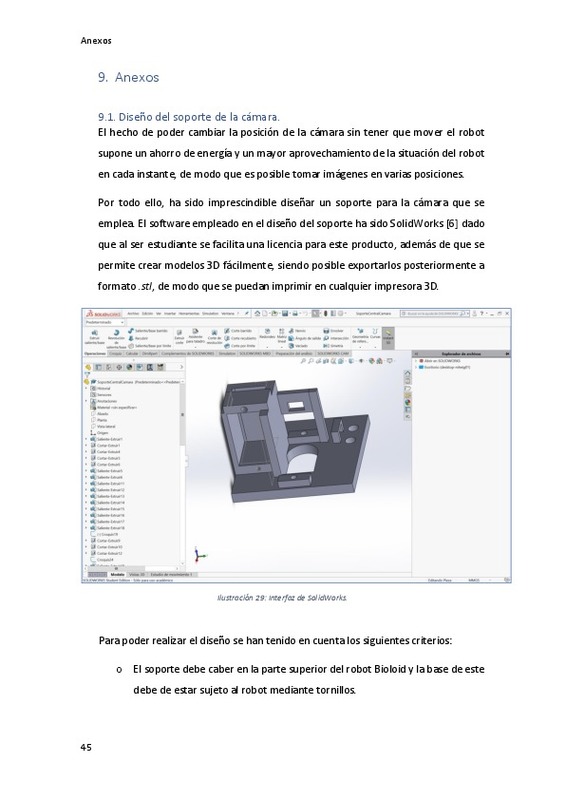
 Conesa Guerrero, Eduard (Universitat Politècnica de València, 2019-11-20)[ES] El objetivo es medir los ángulos de los principales grados de libertad de los brazos de una persona. Para ello, a lo largo de este trabajo se realizará el diseño mecánico de una estructura que se acoplará a los brazos ...
Conesa Guerrero, Eduard (Universitat Politècnica de València, 2019-11-20)[ES] El objetivo es medir los ángulos de los principales grados de libertad de los brazos de una persona. Para ello, a lo largo de este trabajo se realizará el diseño mecánico de una estructura que se acoplará a los brazos ... -
 Araújo, André; Portugal, David; Couceiro, Micael S.; Sales, Jorge; Rocha, Rui P. (Elsevier, 2014-07-06)[EN] This paper presents the TraxBot robot and its full integration in the Robotic Operating System (ROS). The TraxBot is a compact mobile robotic platform developed and assembled at the Institute of Systems and Robots ...
Araújo, André; Portugal, David; Couceiro, Micael S.; Sales, Jorge; Rocha, Rui P. (Elsevier, 2014-07-06)[EN] This paper presents the TraxBot robot and its full integration in the Robotic Operating System (ROS). The TraxBot is a compact mobile robotic platform developed and assembled at the Institute of Systems and Robots ... -
 Meseguer Valenzuela, Andrés (Universitat Politècnica de València, 2019-10-23)[ES] En el presente proyecto se pretende desarrollar un sistema de percepción para un robot humanoide Bioloid, basado en una cámara como sensor principal, complementado con una IMU para reforzar la información de visión. ...
Meseguer Valenzuela, Andrés (Universitat Politècnica de València, 2019-10-23)[ES] En el presente proyecto se pretende desarrollar un sistema de percepción para un robot humanoide Bioloid, basado en una cámara como sensor principal, complementado con una IMU para reforzar la información de visión. ... -
Martínez Ruiz, Carmelo (Universitat Politècnica de València, 2021-02-01)[ES] En este trabajo se realiza un estudio sobre los sistemas empotrados con propiedades de tolerancia a fallos mediante la protección del sistema por Códigos de Corrección de Errores (ECC). En concreto, se pretende proteger ...
-
 Martín Tabares, Pablo (Universitat Politècnica de València, 2021-04-19)[ES] Durante estos últimos años, el desarrollo tecnológico ha propiciado un aumento en las prestaciones de los sistemas digitales, pero a costa de reducir su confiabilidad. Por ejemplo, y gracias a la continua reducción ...
Martín Tabares, Pablo (Universitat Politècnica de València, 2021-04-19)[ES] Durante estos últimos años, el desarrollo tecnológico ha propiciado un aumento en las prestaciones de los sistemas digitales, pero a costa de reducir su confiabilidad. Por ejemplo, y gracias a la continua reducción ... -
Gallardo Abad, Malory (Universitat Politècnica de València, 2023-10-05)[ES] El presente trabajo aborda el desarrollo completo de un panel táctil de bajo coste para el control remoto de instalaciones audiovisuales empleando el protocolo OSC (Open Sound Control). Este tipo de dispositivos da ...
-
 Marín Collado, Juan (Universitat Politècnica de València, 2023-10-11)[ES] Con la ayuda de un escáner 3D y software de modelado, diseño de un acople entre la herramienta eléctrica y su batería extraíble. Este acople, alojará un su interior un microcontrolador. Para la alimentación de este, ...
Marín Collado, Juan (Universitat Politècnica de València, 2023-10-11)[ES] Con la ayuda de un escáner 3D y software de modelado, diseño de un acople entre la herramienta eléctrica y su batería extraíble. Este acople, alojará un su interior un microcontrolador. Para la alimentación de este, ... -
 Pinke, Angéla (Universitat Politècnica de València, 2022-07-29)[ES] Los hogares inteligentes tienen un futuro realmente prometedor y han abierto un campo completamente nuevo para los ingenieros. Para la conectividad entre dispositivos, mantener una conexión a Internet activa en todo ...
Pinke, Angéla (Universitat Politècnica de València, 2022-07-29)[ES] Los hogares inteligentes tienen un futuro realmente prometedor y han abierto un campo completamente nuevo para los ingenieros. Para la conectividad entre dispositivos, mantener una conexión a Internet activa en todo ... -
González Legidos, Juan Manuel (Universitat Politècnica de València, 2014-11-24)[EN] Development of an application for the use of video processing blocks on NiosII
-
 Gallardo Abad, Malory (Universitat Politècnica de València, 2020-12-22)[ES] El presente trabajo final de grado tiene como finalidad el diseño y la implementación de un guante interactivo preparado para la interpretación de lenguaje de signos. El dispositivo contará con diversos sensores como ...
Gallardo Abad, Malory (Universitat Politècnica de València, 2020-12-22)[ES] El presente trabajo final de grado tiene como finalidad el diseño y la implementación de un guante interactivo preparado para la interpretación de lenguaje de signos. El dispositivo contará con diversos sensores como ... -
 Martín García, Guzmán (Universitat Politècnica de València, 2018-11-02)[ES] Hyperloop es un concepto de medio de transporte ideado por Elon Musk que contempla vehículos empleando sistemas de levitación viajando en tubos parcialmente al vacío, minimizando así tanto el rozamiento con el suelo ...
Martín García, Guzmán (Universitat Politècnica de València, 2018-11-02)[ES] Hyperloop es un concepto de medio de transporte ideado por Elon Musk que contempla vehículos empleando sistemas de levitación viajando en tubos parcialmente al vacío, minimizando así tanto el rozamiento con el suelo ... -
 Arenas Aparisi, Antonio (Universitat Politècnica de València, 2024-03-25)[ES] El objetivo de este TFG es el desarrollo de un dispositivo controlado por un microcontrolador, capaz de medir el nivel de monóxido de carbono (CO) y la temperatura en una estancia mediante sensores y de transmitir los ...
Arenas Aparisi, Antonio (Universitat Politècnica de València, 2024-03-25)[ES] El objetivo de este TFG es el desarrollo de un dispositivo controlado por un microcontrolador, capaz de medir el nivel de monóxido de carbono (CO) y la temperatura en una estancia mediante sensores y de transmitir los ... -
 Fe, Jorge Deolindo; Aliaga Varea, Ramón José; Gadea Gironés, Rafael (Springer Netherlands, 2015-08)In the optimization of artificial neural networks (ANNs) via evolutionary algorithms and the implementation of the necessary training for the objective function, there is often a trade-off between efficiency and flexibility. ...
Fe, Jorge Deolindo; Aliaga Varea, Ramón José; Gadea Gironés, Rafael (Springer Netherlands, 2015-08)In the optimization of artificial neural networks (ANNs) via evolutionary algorithms and the implementation of the necessary training for the objective function, there is often a trade-off between efficiency and flexibility. ... -
 Crespo Barberá, Andreu (Universitat Politècnica de València, 2020-09-10)[ES] Los sistemas empotrados basados en placas de pequeño tamaño y bajo coste pero de gran potencia, incorporan gran cantidad de dispositivos que los hacen especialmente atractivos para el desarrollo de aplicaciones en ...
Crespo Barberá, Andreu (Universitat Politècnica de València, 2020-09-10)[ES] Los sistemas empotrados basados en placas de pequeño tamaño y bajo coste pero de gran potencia, incorporan gran cantidad de dispositivos que los hacen especialmente atractivos para el desarrollo de aplicaciones en ... -
 Gadea Gironés, Rafael; Colom Palero, Ricardo José; Herrero Bosch, Vicente (MDPI AG, 2018)[EN] In the optimization of deep neural networks (DNNs) via evolutionary algorithms (EAs) and the implementation of the training necessary for the creation of the objective function, there is often a trade-off between ...
Gadea Gironés, Rafael; Colom Palero, Ricardo José; Herrero Bosch, Vicente (MDPI AG, 2018)[EN] In the optimization of deep neural networks (DNNs) via evolutionary algorithms (EAs) and the implementation of the training necessary for the creation of the objective function, there is often a trade-off between ... -
Vivó Petri, María Vicenta (Universitat Politècnica de València, 2018-01-05)[EN] The goal of the project is the design, assembly and development of a domestic robot for the irrigation of pots, with an autonomous operation in both irrigation and battery charging decisions, and water storage for ...
-
 Coronel, J. O.; Blanes Noguera, Juan Francisco; Pérez Blasco, Pascual; Albero, M.; Benet Gilabert, Ginés; Simó Ten, José Enrique (Universitat Politècnica de València, 2010-09-27)[ES] En este trabajo se describe el diseño y la implementación de una arquitectura distribuida para el control de robots móviles. En el desarrollo de esta arquitectura se han implementado tanto los nodos empotrados encargados ...
Coronel, J. O.; Blanes Noguera, Juan Francisco; Pérez Blasco, Pascual; Albero, M.; Benet Gilabert, Ginés; Simó Ten, José Enrique (Universitat Politècnica de València, 2010-09-27)[ES] En este trabajo se describe el diseño y la implementación de una arquitectura distribuida para el control de robots móviles. En el desarrollo de esta arquitectura se han implementado tanto los nodos empotrados encargados ... -
Tíscar López, María Dolores (Universitat Politècnica de València, 2024-11-03)[ES] Actualmente es habitual encontrar en los entornos de fabricación cámaras dispersas orientadas a la vigilancia del proceso o del espacio de trabajo. Dicho proceso de vigilancia se realiza en muchas ocasiones por parte ...
-
 Real Calvo, Rafael; Moreno Muñoz, Antonio; Pallares López, Víctor; González Redondo, Miguel J.; Moreno García, Isabel M.; Palacios García, Emilio J. (Universitat Politècnica de València, 2017-01-05)[ES] Las transformaciones que están teniendo lugar en el sector eléctrico están haciendo evolucionar la red hacia un modelo más inteligente y eficiente conocido como Smart Grid. En este contexto, a los DERs que se integren ...
Real Calvo, Rafael; Moreno Muñoz, Antonio; Pallares López, Víctor; González Redondo, Miguel J.; Moreno García, Isabel M.; Palacios García, Emilio J. (Universitat Politècnica de València, 2017-01-05)[ES] Las transformaciones que están teniendo lugar en el sector eléctrico están haciendo evolucionar la red hacia un modelo más inteligente y eficiente conocido como Smart Grid. En este contexto, a los DERs que se integren ...
Mostrando ítems 1-20 de 22

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
