


Listar por palabra clave "IMU"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por palabra clave
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por palabra clave "IMU"
Mostrando ítems 1-20 de 25
-
 Ferrer Calatayud, David (Universitat Politècnica de València, 2015-07-17)[ES] La finalidad del proyecto es la de diseñar y desarrollar un sistema emebebido compuesto por un microordenador y una IMU que permita obtener lecturas de movimientos inerciales. Una IMU es un dispositivo formado por ...
Ferrer Calatayud, David (Universitat Politècnica de València, 2015-07-17)[ES] La finalidad del proyecto es la de diseñar y desarrollar un sistema emebebido compuesto por un microordenador y una IMU que permita obtener lecturas de movimientos inerciales. Una IMU es un dispositivo formado por ... -
 Llopis Segura, Marina (Universitat Politècnica de València, 2023-07-26)[ES] La aplicación de nuevas tecnologías al ámbito de la medicina, basadas en el uso de sensores para la medición del movimiento y la actividad muscular, está dando lugar a numerosos avances que permiten profundizar en el ...
Llopis Segura, Marina (Universitat Politècnica de València, 2023-07-26)[ES] La aplicación de nuevas tecnologías al ámbito de la medicina, basadas en el uso de sensores para la medición del movimiento y la actividad muscular, está dando lugar a numerosos avances que permiten profundizar en el ... -
 Estarlich Pau, Josep (Universitat Politècnica de València, 2013-10-25)Este proyecto esta compuesto por dos partes, pero que una sin la otra no tendríamos nada, una parte es el hardware, en el cual tendremos que discutir el tamaño del Arduino, el tamaño del Gps y todos los restantes ...
Estarlich Pau, Josep (Universitat Politècnica de València, 2013-10-25)Este proyecto esta compuesto por dos partes, pero que una sin la otra no tendríamos nada, una parte es el hardware, en el cual tendremos que discutir el tamaño del Arduino, el tamaño del Gps y todos los restantes ... -
 Jimenez-Olmedo, Jose M.; Pueo, Basilio; Mossi García, José Manuel; Villalon-Gasch, Lamberto (MDPI AG, 2023-01)[EN] The aim of this study was to evaluate if the inertial measurement unit (IMU) Vmaxpro is a valid device to estimate vertical jump height (VJH) when compared to a motion capture system (MoCAP). Thirteen highly trained ...
Jimenez-Olmedo, Jose M.; Pueo, Basilio; Mossi García, José Manuel; Villalon-Gasch, Lamberto (MDPI AG, 2023-01)[EN] The aim of this study was to evaluate if the inertial measurement unit (IMU) Vmaxpro is a valid device to estimate vertical jump height (VJH) when compared to a motion capture system (MoCAP). Thirteen highly trained ... -
 León Botella, Joan Francesc de (Universitat Politècnica de València, 2013-09-19)En esta memoria se detalla el proceso de desarrollo de un control de navegación para una pequeña maqueta de barco radiocontrol y dotarla así de cierta autonomía. El proyecto se ha realizado utilizando como pilar básico la ...
León Botella, Joan Francesc de (Universitat Politècnica de València, 2013-09-19)En esta memoria se detalla el proceso de desarrollo de un control de navegación para una pequeña maqueta de barco radiocontrol y dotarla así de cierta autonomía. El proyecto se ha realizado utilizando como pilar básico la ... -
 Cortés Sáez, Aitor (Universitat Politècnica de València, 2015-09-29)[ES] El principal objetivo de este proyecto consiste en la construcción de un vehículo aéreo no tripulado de cuatro rotores y su control de estabilidad utilizando microcontroladores no especializados en este campo de la ...
Cortés Sáez, Aitor (Universitat Politècnica de València, 2015-09-29)[ES] El principal objetivo de este proyecto consiste en la construcción de un vehículo aéreo no tripulado de cuatro rotores y su control de estabilidad utilizando microcontroladores no especializados en este campo de la ... -
 Rudilla Pérez, Juan Francisco (Universitat Politècnica de València, 2018-10-05)Empleando un ordenador en tarjeta Raspberry Pi se pretende obtener datos tanto de un módulo GPS como de una unidad de medida inercial (IMU). Posteriormente se estudiara la forma de unión de estos dos módulos para mejorar ...
Rudilla Pérez, Juan Francisco (Universitat Politècnica de València, 2018-10-05)Empleando un ordenador en tarjeta Raspberry Pi se pretende obtener datos tanto de un módulo GPS como de una unidad de medida inercial (IMU). Posteriormente se estudiara la forma de unión de estos dos módulos para mejorar ... -
 Martín Molina, Javier (Universitat Politècnica de València, 2024-10-02)[ES] Introducción: Los exoesqueletos de las extremidades inferiores presentan una vía prometedora para ayudar a las personas con problemas de movilidad a lograr mejores patrones de marcha y funcionalidad, si bien los ...
Martín Molina, Javier (Universitat Politècnica de València, 2024-10-02)[ES] Introducción: Los exoesqueletos de las extremidades inferiores presentan una vía prometedora para ayudar a las personas con problemas de movilidad a lograr mejores patrones de marcha y funcionalidad, si bien los ... -
 Meseguer Valenzuela, Andrés (Universitat Politècnica de València, 2019-10-23)[ES] En el presente proyecto se pretende desarrollar un sistema de percepción para un robot humanoide Bioloid, basado en una cámara como sensor principal, complementado con una IMU para reforzar la información de visión. ...
Meseguer Valenzuela, Andrés (Universitat Politècnica de València, 2019-10-23)[ES] En el presente proyecto se pretende desarrollar un sistema de percepción para un robot humanoide Bioloid, basado en una cámara como sensor principal, complementado con una IMU para reforzar la información de visión. ... -
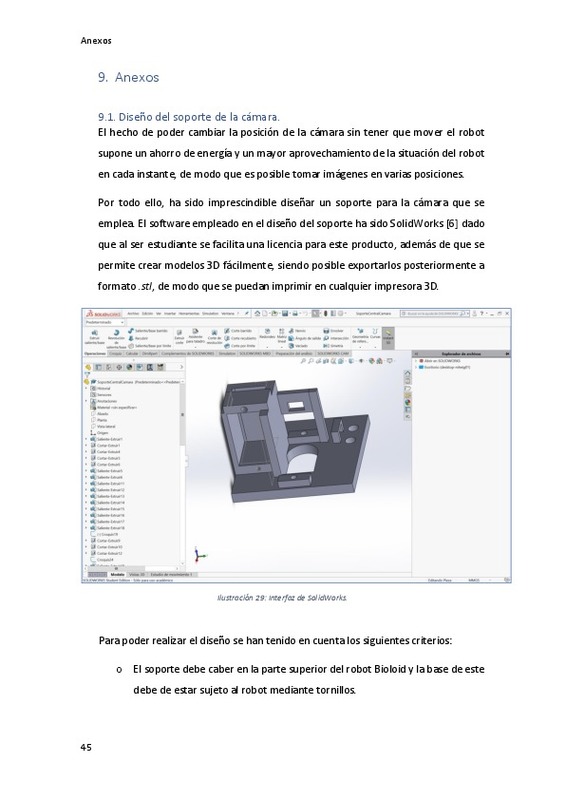
 Babiera Sancho, Carlos (Universitat Politècnica de València, 2016-09-12)[ES] En el presente proyecto se muestra el diseño de una aplicación programada en LabVIEW, con la cual se controla la posición del brazo robot S300105 de 5 ejes y 4 articulaciones desarrollado por Lynxmotion, Inc. Esta ...
Babiera Sancho, Carlos (Universitat Politècnica de València, 2016-09-12)[ES] En el presente proyecto se muestra el diseño de una aplicación programada en LabVIEW, con la cual se controla la posición del brazo robot S300105 de 5 ejes y 4 articulaciones desarrollado por Lynxmotion, Inc. Esta ... -
Gadea Pastor, Jesús (Universitat Politècnica de València, 2015-11-06)En este trabajo se pretende desarrollar un control de posición en una barra que tiene un grado de libertad, dicha barra gira respecto a un eje que pasa por su centro de gravedad. El movimiento del brazo es debido a la ...
-
Lorente Monzó, Juan (Universitat Politècnica de València, 2015-07-06)El objetivo del proyecto es el diseño de un control por Arduino de una embarcación, de manera que ésta sea capaz de alcanzar las localizaciones indicadas por el usuario de forma autónoma al tiempo que tiene en cuenta otros ...
-
Felici Ferrís, Juan (Universitat Politècnica de València, 2015-11-25)Este trabajo versa sobre el concepto de unidad de medición inercial, con especial interés en su aplicación aeroespacial. Tras una introducción donde se establece el porqué de su presencia en aplicaciones aeroespaciales, ...
-
 Garratón Gil, Fátima (Universitat Politècnica de València, 2022-09-02)[ES] Los sistemas de medida inerciales son una herramienta ampliamente utilizada para la determinación de la orientación en el espacio de un sólido rígido sobre el que se encuentran fijados. Durante los últimos años se han ...
Garratón Gil, Fátima (Universitat Politècnica de València, 2022-09-02)[ES] Los sistemas de medida inerciales son una herramienta ampliamente utilizada para la determinación de la orientación en el espacio de un sólido rígido sobre el que se encuentran fijados. Durante los últimos años se han ... -
Ballester Mainar, Ferran (Universitat Politècnica de València, 2022-10-14)[ES] Día tras día estamos viendo cómo la movilidad eléctrica va ganando terreno frente a las diferentes opciones de movilidad ya existentes. Esto se traduce en que prácticamente todos los vehículos que conocemos tienen ya ...
-
Doncel Romero, Jorge (Universitat Politècnica de València, 2015-11-26)En la actualidad, encontramos gliders submarinos no tripulados por todo el mundo recolectando diferentes datos de las aguas oceánicas y sus ecosistemas. Este trabajo fin de máster inicia el desarrollo del sistema mecatrónico ...
-
 García Salinas, Conrado (Universitat Politècnica de València, 2018-09-07)[ES] Este trabajo se ha orientado a la creación de un dispositivo que pueda controlar de forma integral un quadrotor en vuelo libre. Para ello se ha utilizado el sistema de posicionamiento Optitrack, se ha montado un ...
García Salinas, Conrado (Universitat Politècnica de València, 2018-09-07)[ES] Este trabajo se ha orientado a la creación de un dispositivo que pueda controlar de forma integral un quadrotor en vuelo libre. Para ello se ha utilizado el sistema de posicionamiento Optitrack, se ha montado un ... -
Leon Dasi, Mireia (Universitat Politècnica de València, 2019-07-18)[CA] El projecte recull la contribució com investigadora individual a l'Experiment de Des-òrbita Aerodinàmica (ADE en endavant) desenvolupat per Purdue University, California Polytechnic State University i Georgia Institute ...
-
 Fernández Carbonell, Marcos (Universitat Politècnica de València, 2018-10-01)El presente trabajo final de grado tiene como finalidad el disen¿o y desarrollo de un sistema de lectura basado en un microcontrolador y un conjunto de sensores ubicados en un guante, que permita la navegacio¿n a trave¿s ...
Fernández Carbonell, Marcos (Universitat Politècnica de València, 2018-10-01)El presente trabajo final de grado tiene como finalidad el disen¿o y desarrollo de un sistema de lectura basado en un microcontrolador y un conjunto de sensores ubicados en un guante, que permita la navegacio¿n a trave¿s ... -
 Navarro Tarin, Santiago (Editorial Universitat Politècnica de València, 2014-06-03)Las plataformas de georreferenciación de sensores, ya sean aerotransportadas, formando parte de los conocidos vehículos no tripulados (UAV), navales o terrestres, están teniendo mucho interés en los últimos años. La ...
Navarro Tarin, Santiago (Editorial Universitat Politècnica de València, 2014-06-03)Las plataformas de georreferenciación de sensores, ya sean aerotransportadas, formando parte de los conocidos vehículos no tripulados (UAV), navales o terrestres, están teniendo mucho interés en los últimos años. La ...
Mostrando ítems 1-20 de 25

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
