


Listar por palabra clave "Ingeniería de control"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por palabra clave
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por palabra clave "Ingeniería de control"
Mostrando ítems 1-19 de 19
-
 Solanes Galbis, Juan Ernesto (2023-02-01)En este objeto de aprendizaje el alumno podrá aprender como obtener las expresiones de frecuencia máxima y fase máxima características de los compensadores en adelanto establecidas en los libros de ingeniería de control.
Solanes Galbis, Juan Ernesto (2023-02-01)En este objeto de aprendizaje el alumno podrá aprender como obtener las expresiones de frecuencia máxima y fase máxima características de los compensadores en adelanto establecidas en los libros de ingeniería de control. -
 Sala Piqueras, Antonio (Universitat Politècnica de València, 2018-02-14)Este objeto de aprendizaje motiva el concepto de realimentación del estado (plena información) versus realimentación de la salida o control robusto (que no son objetivo de este vídeo). Discute por qué no es necesaria ...
Sala Piqueras, Antonio (Universitat Politècnica de València, 2018-02-14)Este objeto de aprendizaje motiva el concepto de realimentación del estado (plena información) versus realimentación de la salida o control robusto (que no son objetivo de este vídeo). Discute por qué no es necesaria ... -
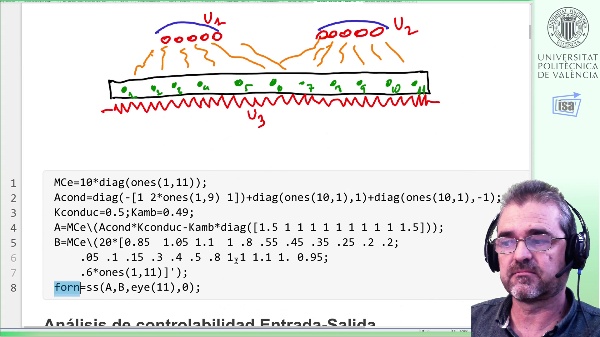 Sala Piqueras, Antonio (2021-06-09)Este vídeo desarrolla el diseño del control por desacoplamiento SVD de un modelo de horno lineal. Se dedica hasta el minuto [02:50] a revisar el modelado y controlabilidad entrada/salida de forma rápida. Se sintonizan ...
Sala Piqueras, Antonio (2021-06-09)Este vídeo desarrolla el diseño del control por desacoplamiento SVD de un modelo de horno lineal. Se dedica hasta el minuto [02:50] a revisar el modelado y controlabilidad entrada/salida de forma rápida. Se sintonizan ... -
 Huilcapi Subia, Victor (Universitat Politècnica de València, 2021-03-30)[ES] El control descentralizado de sistemas multivariables es una tarea compleja y su eficiencia depende principalmente de la selección adecuada de sus lazos de control. Por lo general, para seleccionar estos lazos de ...
Huilcapi Subia, Victor (Universitat Politècnica de València, 2021-03-30)[ES] El control descentralizado de sistemas multivariables es una tarea compleja y su eficiencia depende principalmente de la selección adecuada de sus lazos de control. Por lo general, para seleccionar estos lazos de ... -
 Lunardi, Angelo S.; Cambero, Eduardo V. V.; Cardoso, Jaqueline G.; Casella, Ivan R. S.; Sguarezi Filho, Alfeu J.; Capovilla, Carlos E. (Universitat Politècnica de València, 2018-09-24)[ES] Actualmente, con el avance de las tecnologías de smart grid, la participación de las fuentes renovables en los sistemas energéticos está cambiando para atender las nuevas necesidades y aumentar la eficiencia de los ...
Lunardi, Angelo S.; Cambero, Eduardo V. V.; Cardoso, Jaqueline G.; Casella, Ivan R. S.; Sguarezi Filho, Alfeu J.; Capovilla, Carlos E. (Universitat Politècnica de València, 2018-09-24)[ES] Actualmente, con el avance de las tecnologías de smart grid, la participación de las fuentes renovables en los sistemas energéticos está cambiando para atender las nuevas necesidades y aumentar la eficiencia de los ... -
 Solanes Galbis, Juan Ernesto (2024-04-10)En este objeto de aprendizaje el alumno podrá aprender como obtener las expresiones de la fase mínima y frecuencia a la que se produce características de los compensadores en atraso establecidas en los libros de ingeniería ...
Solanes Galbis, Juan Ernesto (2024-04-10)En este objeto de aprendizaje el alumno podrá aprender como obtener las expresiones de la fase mínima y frecuencia a la que se produce características de los compensadores en atraso establecidas en los libros de ingeniería ... -
 Gimeno Ruiz, Carlos (Universitat Politècnica de València, 2021-10-13)[ES] El presente Trabajo Final de Máster se encarga del diseño de un sistema de control que sea capaz de estabilizar la velocidad lineal y la inclinación del modelo no lineal de un Segway mediante diferentes técnicas, ...
Gimeno Ruiz, Carlos (Universitat Politècnica de València, 2021-10-13)[ES] El presente Trabajo Final de Máster se encarga del diseño de un sistema de control que sea capaz de estabilizar la velocidad lineal y la inclinación del modelo no lineal de un Segway mediante diferentes técnicas, ... -
 Escrivá Salvador, Alberto (Universitat Politècnica de València, 2019-10-22)[ES] En este trabajo se plantea el diseño del control predictivo (MPC) para un evaporador industrial. El controlador se ha implementado en Matlab mediante el algoritmo DMC. Además del control predictivo propiamente dicho, ...
Escrivá Salvador, Alberto (Universitat Politècnica de València, 2019-10-22)[ES] En este trabajo se plantea el diseño del control predictivo (MPC) para un evaporador industrial. El controlador se ha implementado en Matlab mediante el algoritmo DMC. Además del control predictivo propiamente dicho, ... -
 Aracil, Javier (Universitat Politècnica de València, 2011-01-04)[ES] En este artículo se analiza el sentido de la locución ingeniero científico, a partir de una discusión de la especificidad de la ingeniería y de su método. Se parte del papel fundamental jugado por la técnica en la ...
Aracil, Javier (Universitat Politècnica de València, 2011-01-04)[ES] En este artículo se analiza el sentido de la locución ingeniero científico, a partir de una discusión de la especificidad de la ingeniería y de su método. Se parte del papel fundamental jugado por la técnica en la ... -
 Hernández Hernández, Lucía; Pestana, Jesús; Casares Palomeque, Daniel; Campoy, Pascual; Sánchez López, José Luis (Universitat Politècnica de València, 2013-07-09)[ES] En este trabajo se describen los análisis y los procesos realizados para obtener la identificación del modelo y el diseño del controlador, así como su posterior implementación, para el cuatrirrotor de tipo Parrot ...
Hernández Hernández, Lucía; Pestana, Jesús; Casares Palomeque, Daniel; Campoy, Pascual; Sánchez López, José Luis (Universitat Politècnica de València, 2013-07-09)[ES] En este trabajo se describen los análisis y los procesos realizados para obtener la identificación del modelo y el diseño del controlador, así como su posterior implementación, para el cuatrirrotor de tipo Parrot ... -
 Ribera Esplugues, Víctor (Universitat Politècnica de València, 2019-09-20)[ES] El alumno deberá aplicar sus conocimientos en ingeniería de control y modelado dinámico, asi como su conocimientos de programación para implementar, ajustar y validar el sistema de simulación Hardwar-in-the-loop de ...
Ribera Esplugues, Víctor (Universitat Politècnica de València, 2019-09-20)[ES] El alumno deberá aplicar sus conocimientos en ingeniería de control y modelado dinámico, asi como su conocimientos de programación para implementar, ajustar y validar el sistema de simulación Hardwar-in-the-loop de ... -
 Smith Ballester, Laura Cristina (Universitat Politècnica de València, 2019-10-11)[ES] Este trabajo se centra en la adaptación del código del piloto automático de código libre ArduPilot a los controladores diseñados para el vehículo aéreo no tripulado del proyecto HERMES-UPV. El objetivo de esta adaptación ...
Smith Ballester, Laura Cristina (Universitat Politècnica de València, 2019-10-11)[ES] Este trabajo se centra en la adaptación del código del piloto automático de código libre ArduPilot a los controladores diseñados para el vehículo aéreo no tripulado del proyecto HERMES-UPV. El objetivo de esta adaptación ... -
 Sala Piqueras, Antonio (Universitat Politècnica de València, 2019-03-12)Este objeto de aprendizaje presenta el análisis mediante de estabilidad robusta fórmulas de pequeña ganancia de un proceso cuyo modelo nominal es P=M^{-1}N, pero cuyo modelo incierto es P(Delta):=(M+Delta_M)^{-1}(N+Delta_N). ...
Sala Piqueras, Antonio (Universitat Politècnica de València, 2019-03-12)Este objeto de aprendizaje presenta el análisis mediante de estabilidad robusta fórmulas de pequeña ganancia de un proceso cuyo modelo nominal es P=M^{-1}N, pero cuyo modelo incierto es P(Delta):=(M+Delta_M)^{-1}(N+Delta_N). ... -
 Sala Piqueras, Antonio (Universitat Politècnica de València, 2019-02-13)Este vídeo aborda los mínimos cuadrados recursivos, con factor de olvido exponencial o con filtro de Kalman con dinámica y ruido en los parámetros (no constantes). Primero aborda una motivacio¿n a la identificacio¿n de ...
Sala Piqueras, Antonio (Universitat Politècnica de València, 2019-02-13)Este vídeo aborda los mínimos cuadrados recursivos, con factor de olvido exponencial o con filtro de Kalman con dinámica y ruido en los parámetros (no constantes). Primero aborda una motivacio¿n a la identificacio¿n de ... -
 Salcedo Romero de Ávila, José Vicente (Universitat Politècnica de València, 2024-06-18)En este vídeo se clasifican los procesos industriales en continuos, secuenciales y batch. Finalmente, se comparan las características del control continuo y secuencial.
Salcedo Romero de Ávila, José Vicente (Universitat Politècnica de València, 2024-06-18)En este vídeo se clasifican los procesos industriales en continuos, secuenciales y batch. Finalmente, se comparan las características del control continuo y secuencial. -
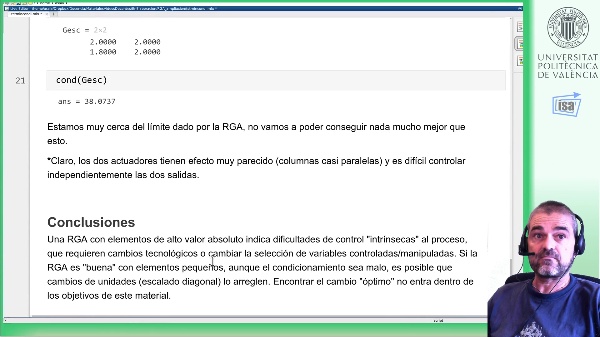 Sala Piqueras, Antonio (Universitat Politècnica de València, 2020-02-14)Este vídeo presenta un ejemplo Matlab ilustrando la independencia del escalado y la relacio¿n que existe entre los elementos de la RGA y el nu¿mero de condicio¿n o¿ptimo tras escalado diagonal en un proceso. Primero, ...
Sala Piqueras, Antonio (Universitat Politècnica de València, 2020-02-14)Este vídeo presenta un ejemplo Matlab ilustrando la independencia del escalado y la relacio¿n que existe entre los elementos de la RGA y el nu¿mero de condicio¿n o¿ptimo tras escalado diagonal en un proceso. Primero, ... -
 Sanz Díaz, Ricardo (Universitat Politècnica de València, 2018-10-30)Los sistemas con retardo temporal aparecen con frecuencia en el ámbito de la ingeniería, por ejemplo en transmisiones hidráulicas o mecánicas, procesos metalúrgicos o sistemas de control en red. Los retardos temporales han ...
Sanz Díaz, Ricardo (Universitat Politècnica de València, 2018-10-30)Los sistemas con retardo temporal aparecen con frecuencia en el ámbito de la ingeniería, por ejemplo en transmisiones hidráulicas o mecánicas, procesos metalúrgicos o sistemas de control en red. Los retardos temporales han ... -
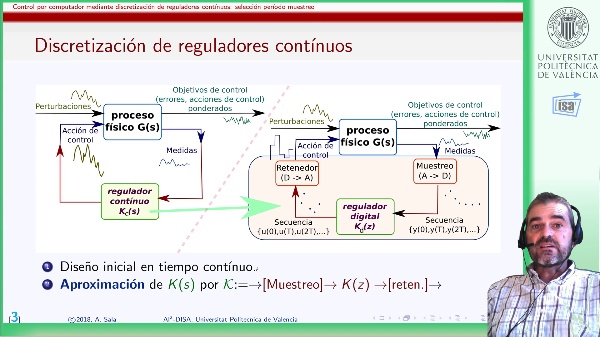 Sala Piqueras, Antonio (Universitat Politècnica de València, 2021-06-09)En este vídeo se discuten criterios específicos para la selección del período de muestreo en reguladores digitales obtenidos a partir de discretización de reguladores contínuos preexistentes. Se realiza un análisis ...
Sala Piqueras, Antonio (Universitat Politècnica de València, 2021-06-09)En este vídeo se discuten criterios específicos para la selección del período de muestreo en reguladores digitales obtenidos a partir de discretización de reguladores contínuos preexistentes. Se realiza un análisis ... -
Ruiz Riquelme, Daniel (2022-04-01)[ES] En este trabajo final de grado se ha diseñado un esquema de control adaptativo con el objetivo principal de limitar de forma automática la cantidad de eventos hipoglucémicos debidos a la variabilidad que sufre el ...
Mostrando ítems 1-19 de 19

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
