


Listar por palabra clave "Mechatronics"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por palabra clave
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por palabra clave "Mechatronics"
Mostrando ítems 1-17 de 17
-
 Almazán Ortega, Enrique Jesús (Universitat Politècnica de València, 2023-03-28)[ES] El objetivo del proyecto consiste en reducir los tiempos de trabajo en una línea de producción de asientos mediante la automatización de la lectura de dos elementos. La primera lectura que vamos a automatizar es el ...
Almazán Ortega, Enrique Jesús (Universitat Politècnica de València, 2023-03-28)[ES] El objetivo del proyecto consiste en reducir los tiempos de trabajo en una línea de producción de asientos mediante la automatización de la lectura de dos elementos. La primera lectura que vamos a automatizar es el ... -
Escribano Martínez, Pedro Juan (Universitat Politècnica de València, 2021-01-12)[ES] Partiendo de una empresa cuya actividad principal es la fabricación de equipos eléctricos y electrónicos para automóviles, Mahle Electronics, se requiere mejorar el proceso de producción y el control de calidad de ...
-
 Hernández-Méndez, A.; Guerrero-Castellanos, J.F.; Orozco-Urbieta, T.; Linares-Flores, J.; Mino-Aguilar, G.; Curiel, G. (Universitat Politècnica de València, 2021-09-30)[EN] This work presents the design and implementation of a collaborative and decentralized control for synchronizing the angular velocity of a group of spatially distributed brushless direct current (BLDC) motors. Via an ...
Hernández-Méndez, A.; Guerrero-Castellanos, J.F.; Orozco-Urbieta, T.; Linares-Flores, J.; Mino-Aguilar, G.; Curiel, G. (Universitat Politècnica de València, 2021-09-30)[EN] This work presents the design and implementation of a collaborative and decentralized control for synchronizing the angular velocity of a group of spatially distributed brushless direct current (BLDC) motors. Via an ... -
 Cortés Sáez, Aitor (Universitat Politècnica de València, 2015-09-29)[ES] El principal objetivo de este proyecto consiste en la construcción de un vehículo aéreo no tripulado de cuatro rotores y su control de estabilidad utilizando microcontroladores no especializados en este campo de la ...
Cortés Sáez, Aitor (Universitat Politècnica de València, 2015-09-29)[ES] El principal objetivo de este proyecto consiste en la construcción de un vehículo aéreo no tripulado de cuatro rotores y su control de estabilidad utilizando microcontroladores no especializados en este campo de la ... -
 González Sanjuán, Johan (Universitat Politècnica de València, 2022-09-05)[ES] El siguiente documento es la memoria del Trabajo de Fin de Máster desarrollado por el alumno Johan González Sanjuán. Se ha llevado a cabo en la Universidad de Keio, Japón, bajo la supervisión de Norihisa Miki como ...
González Sanjuán, Johan (Universitat Politècnica de València, 2022-09-05)[ES] El siguiente documento es la memoria del Trabajo de Fin de Máster desarrollado por el alumno Johan González Sanjuán. Se ha llevado a cabo en la Universidad de Keio, Japón, bajo la supervisión de Norihisa Miki como ... -
 Design and implementation of a remote controlled excavator using a microcontroller and 3D printing Lomm Hedvold, Hampus (Universitat Politècnica de València, 2022-09-12)[ES] El objetivo de este proyecto es diseñar una excavadora manejada remotamente por radio que se controlará mediante un microcontrolador. Las piezas para el cuerpo de la excavadora se diseñarán mediante CAD y se imprimirán ...
Design and implementation of a remote controlled excavator using a microcontroller and 3D printing Lomm Hedvold, Hampus (Universitat Politècnica de València, 2022-09-12)[ES] El objetivo de este proyecto es diseñar una excavadora manejada remotamente por radio que se controlará mediante un microcontrolador. Las piezas para el cuerpo de la excavadora se diseñarán mediante CAD y se imprimirán ... -
Barrera González, Héctor (Universitat Politècnica de València, 2020-10-16)[ES] El proyecto propone el diseño de una sistema electrónico que controla un propulsor de una silla de ruedas basado en un segway o herramienta equivalente. El sistema permite a personas con movilidad reducida controlar ...
-
 Piquer Mora, Iván (Universitat Politècnica de València, 2016-09-26)[ES] El objeto de este proyecto es la programación y puesta en marcha de una máquina CNC de tres ejes, dotada de la funcionalidad específica de taladrado. A lo largo del mismo, se va a analizar cualquier aspecto importante ...
Piquer Mora, Iván (Universitat Politècnica de València, 2016-09-26)[ES] El objeto de este proyecto es la programación y puesta en marcha de una máquina CNC de tres ejes, dotada de la funcionalidad específica de taladrado. A lo largo del mismo, se va a analizar cualquier aspecto importante ... -
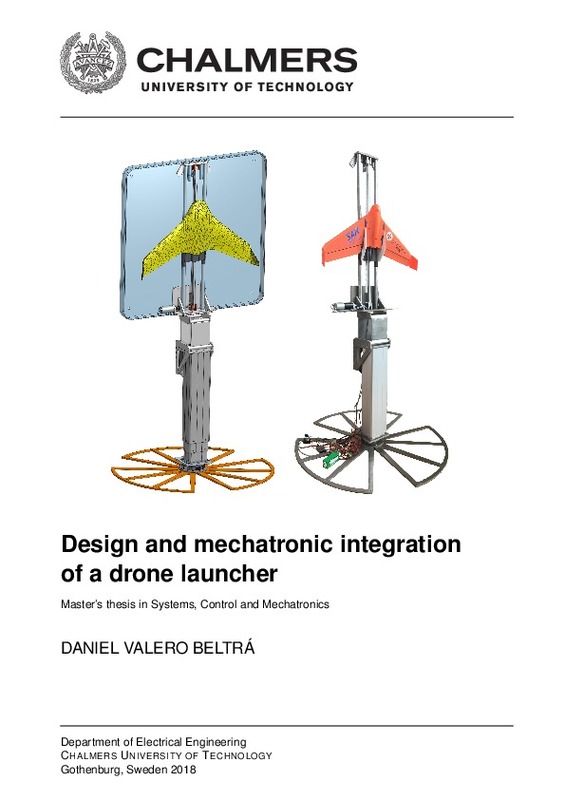 Valero Beltrá, Daniel (Universitat Politècnica de València, 2020-04-14)[ES] Este trabajo de fin de máster es parte de un proyecto de lanzadera de drones desarrollado por la Sociedad Sueca de Salvamento Marítimo (SSRS). El objetivo del proyecto es tener una lanzadera de drones fija que se pueda ...
Valero Beltrá, Daniel (Universitat Politècnica de València, 2020-04-14)[ES] Este trabajo de fin de máster es parte de un proyecto de lanzadera de drones desarrollado por la Sociedad Sueca de Salvamento Marítimo (SSRS). El objetivo del proyecto es tener una lanzadera de drones fija que se pueda ... -
García Dasi, Alejandro (Universitat Politècnica de València, 2021-12-14)[ES] El objetivo de este trabajo es el diseño y construcción de un robot móvil para dar asistencia dentro de la telepresencia, permitiendo el desplazamiento y la interacción con un interlocutor conectado remotamente. En ...
-
Alonso Macarro, Efrén (Universitat Politècnica de València, 2016-09-20)[EN] The dissertation consist of the design review of a temperature recorder prototype and the subsequent manufacture and sale of the first commercial series. This thesis explains the device technical features, reference ...
-
 Cazalilla, J.; Vallés Miquel, Marina; Valera Fernández, Ángel; Mata Amela, Vicente; Díaz-Rodríguez, Miguel (Taylor & Francis, 2016-04-02)[EN] A robot interacting with the environment requires that the end effector \hboxposition is tracked and that the forces of contact are kept below certain reference values. For instance, in a rehabilitation session using ...
Cazalilla, J.; Vallés Miquel, Marina; Valera Fernández, Ángel; Mata Amela, Vicente; Díaz-Rodríguez, Miguel (Taylor & Francis, 2016-04-02)[EN] A robot interacting with the environment requires that the end effector \hboxposition is tracked and that the forces of contact are kept below certain reference values. For instance, in a rehabilitation session using ... -
 Vallés Miquel, Marina; Araujo-Gómez, P.; Mata Amela, Vicente; Valera Fernández, Ángel; Díaz-Rodríguez, Miguel; Page Del Pozo, Alvaro Felipe; Farhat, Nidal (Taylor & Francis, 2018)[EN] Although parallel manipulators started with the introduction of architectures with six degrees of freedom, a vast number of applications require less than six degrees of freedom. Consequently, scholars have proposed ...
Vallés Miquel, Marina; Araujo-Gómez, P.; Mata Amela, Vicente; Valera Fernández, Ángel; Díaz-Rodríguez, Miguel; Page Del Pozo, Alvaro Felipe; Farhat, Nidal (Taylor & Francis, 2018)[EN] Although parallel manipulators started with the introduction of architectures with six degrees of freedom, a vast number of applications require less than six degrees of freedom. Consequently, scholars have proposed ... -
 Vallés Miquel, Marina; Díaz-Rodríguez, Miguel; Valera Fernández, Ángel; Mata Amela, Vicente; Page Del Pozo, Alvaro Felipe (Taylor & Francis, 2012-09)The aim of this article is to develop, from the mechatronic point of view, a low-cost parallel manipulator (PM) with 3-degrees of freedom (DOF). The robot has to be able to generate and control one translational motion ...
Vallés Miquel, Marina; Díaz-Rodríguez, Miguel; Valera Fernández, Ángel; Mata Amela, Vicente; Page Del Pozo, Alvaro Felipe (Taylor & Francis, 2012-09)The aim of this article is to develop, from the mechatronic point of view, a low-cost parallel manipulator (PM) with 3-degrees of freedom (DOF). The robot has to be able to generate and control one translational motion ... -
 Universitat Politècnica de València (Editorial Universitat Politècnica de València, 2011-10-25)El libro de actas recoge las aportaciones de los autores a través de los correspondientes artículos a la Dinámica de Sistemas Multicuerpo y la Mecatrónica (Musme). Estas disciplinas se han convertido en una importante ...
Universitat Politècnica de València (Editorial Universitat Politècnica de València, 2011-10-25)El libro de actas recoge las aportaciones de los autores a través de los correspondientes artículos a la Dinámica de Sistemas Multicuerpo y la Mecatrónica (Musme). Estas disciplinas se han convertido en una importante ... -
 Boronat-Moll, Carles; Dahoui Obón, José Mariano (Editorial Universitat Politècnica de València, 2020-12-23)[ES] La realización de un proyecto grupal en el segundo curso del ciclo fomativo del grado superior en Mecatrónica Industrial adaptando una de las asignaturas (Configuración de sistemas mecatrónicos) y adaptando otras del ...
Boronat-Moll, Carles; Dahoui Obón, José Mariano (Editorial Universitat Politècnica de València, 2020-12-23)[ES] La realización de un proyecto grupal en el segundo curso del ciclo fomativo del grado superior en Mecatrónica Industrial adaptando una de las asignaturas (Configuración de sistemas mecatrónicos) y adaptando otras del ... -
 Low, Cheng Yee; Aziz, Norheliena; Aldemir, Mustafa; Dumitrescu, Roman; Anacker, Harald; Mellado Arteche, Martín (Springer Verlag (Germany), 2013-01)[EN] Collaborative humanoid soccer robots are currently under the lime light in the rapidly advancing research area of multi-robot systems. With new functionalities of software and hardware, they are becoming more versatile, ...
Low, Cheng Yee; Aziz, Norheliena; Aldemir, Mustafa; Dumitrescu, Roman; Anacker, Harald; Mellado Arteche, Martín (Springer Verlag (Germany), 2013-01)[EN] Collaborative humanoid soccer robots are currently under the lime light in the rapidly advancing research area of multi-robot systems. With new functionalities of software and hardware, they are becoming more versatile, ...
Mostrando ítems 1-17 de 17

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
