


Listar por palabra clave "Robust control"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por palabra clave
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por palabra clave "Robust control"
Mostrando ítems 1-20 de 23
-
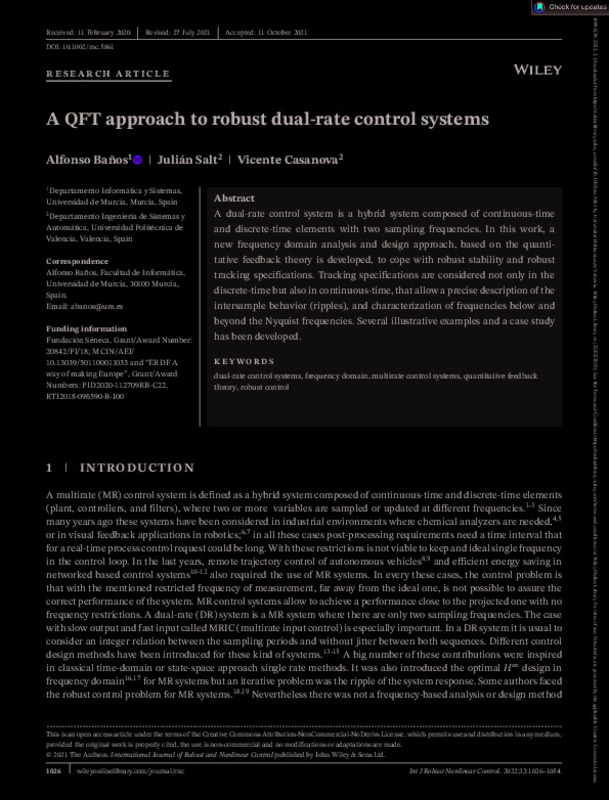 Baños, Alfonso; Salt Llobregat, Julián José; Casanova Calvo, Vicente (John Wiley & Sons, 2022-01-25)[EN] A dual-rate control system is a hybrid system composed of continuous-time and discrete-time elements with two sampling frequencies. In this work, a new frequency domain analysis and design approach, based on the ...
Baños, Alfonso; Salt Llobregat, Julián José; Casanova Calvo, Vicente (John Wiley & Sons, 2022-01-25)[EN] A dual-rate control system is a hybrid system composed of continuous-time and discrete-time elements with two sampling frequencies. In this work, a new frequency domain analysis and design approach, based on the ... -
 Martínez Iranzo, Miguel Andrés; Sanchís Saez, Javier; Blasco Ferragud, Francesc Xavier (Universitat Politècnica de València, 2010-09-27)[ES] La estrategia de optimización multiobjetivo denominada Programación Física o Physical Programming (PP) permite al diseñador expresar sus preferencias explícitamente para cada objetivo de diseño (tiempo de establecimiento, ...
Martínez Iranzo, Miguel Andrés; Sanchís Saez, Javier; Blasco Ferragud, Francesc Xavier (Universitat Politècnica de València, 2010-09-27)[ES] La estrategia de optimización multiobjetivo denominada Programación Física o Physical Programming (PP) permite al diseñador expresar sus preferencias explícitamente para cada objetivo de diseño (tiempo de establecimiento, ... -
 Muñoz Mansilla, R.; Aranda, J.; Díaz, J.M.; Chaos, D. (Elsevier, 2012-07-08)[ES] En este trabajo se realiza un análisis de diferentes metodologías de control robusto basadas en la técnica denominada Teoría de la Realimentación Cuantitativa, QFT (Quantitative Feedback Theory) para resolver diferentes ...
Muñoz Mansilla, R.; Aranda, J.; Díaz, J.M.; Chaos, D. (Elsevier, 2012-07-08)[ES] En este trabajo se realiza un análisis de diferentes metodologías de control robusto basadas en la técnica denominada Teoría de la Realimentación Cuantitativa, QFT (Quantitative Feedback Theory) para resolver diferentes ... -
 García-Fernández, Alberto; Solanes, J. Ernesto; Gracia Calandin, Luis Ignacio; Muñoz-Benavent, Pau; Girbés-Juan, Vicent; Tornero, Josep (Taylor & Francis, 2022-01-02)[EN] This work develops a method to perform surface treatment tasks using a bimanual robotic system, i.e. two robot arms cooperatively performing the task. In particular, one robot arm holds the work-piece while the other ...
García-Fernández, Alberto; Solanes, J. Ernesto; Gracia Calandin, Luis Ignacio; Muñoz-Benavent, Pau; Girbés-Juan, Vicent; Tornero, Josep (Taylor & Francis, 2022-01-02)[EN] This work develops a method to perform surface treatment tasks using a bimanual robotic system, i.e. two robot arms cooperatively performing the task. In particular, one robot arm holds the work-piece while the other ... -
 Gutiérrez Giles, Alejandro; Arteaga Pérez, Marco A.; Sira Ramírez, Hebertt (Elsevier, 2016-04-06)[EN] In this work the design of a linear observer–linear controller robust output feedback scheme is introduced for simultaneous trajectory tracking of position and force in fully actuated robot manipulators. The unknown ...
Gutiérrez Giles, Alejandro; Arteaga Pérez, Marco A.; Sira Ramírez, Hebertt (Elsevier, 2016-04-06)[EN] In this work the design of a linear observer–linear controller robust output feedback scheme is introduced for simultaneous trajectory tracking of position and force in fully actuated robot manipulators. The unknown ... -
 Guerrero Ramírez, Esteban Osvaldo; Martínez Barbosa, Alberto; Guzmán Ramírez, Enrique; Linares Flores, Jesús; Sira Ramírez, Hebertt (Universitat Politècnica de València, 2018-06-22)[ES] El presente artículo documenta el diseño e implementación de un controlador robusto para el convertidor CD/CD Reductor–Paralelo, bajo la perspectiva de la planitud diferencial y la técnica del control por rechazo ...
Guerrero Ramírez, Esteban Osvaldo; Martínez Barbosa, Alberto; Guzmán Ramírez, Enrique; Linares Flores, Jesús; Sira Ramírez, Hebertt (Universitat Politècnica de València, 2018-06-22)[ES] El presente artículo documenta el diseño e implementación de un controlador robusto para el convertidor CD/CD Reductor–Paralelo, bajo la perspectiva de la planitud diferencial y la técnica del control por rechazo ... -
 López-Martínez, Manuel; Ortega, Manuel G.; Vivas, Carlos; Rubio, Francisco R. (Universitat Politècnica de València, 2009-12-02)[EN] This paper presents the design of a robust nonlinear controller for a scaled helicopter. This device features rotors with fixed angles of attack blades, and is controlled by changing the speed of the rotors using two ...
López-Martínez, Manuel; Ortega, Manuel G.; Vivas, Carlos; Rubio, Francisco R. (Universitat Politècnica de València, 2009-12-02)[EN] This paper presents the design of a robust nonlinear controller for a scaled helicopter. This device features rotors with fixed angles of attack blades, and is controlled by changing the speed of the rotors using two ... -
 Rascón, Raúl; Flores-Mendoza, Adrián; Moreno-Valenzuela, Javier; Aguilar-Avelar, Carlos (Universitat Politècnica de València, 2024-06-30)[EN] This article addresses Cartesian control for trajectory tracking of robot manipulators. The desired trajectories are proposed in Cartesian space. Through inverse kinematics, the desired trajectories in the joint space ...
Rascón, Raúl; Flores-Mendoza, Adrián; Moreno-Valenzuela, Javier; Aguilar-Avelar, Carlos (Universitat Politècnica de València, 2024-06-30)[EN] This article addresses Cartesian control for trajectory tracking of robot manipulators. The desired trajectories are proposed in Cartesian space. Through inverse kinematics, the desired trajectories in the joint space ... -
 Hidalgo, H.; Huerta, H. (Universitat Politècnica de València, 2021-04-06)[EN] In this paper, a control scheme to regulate the speed in an electric vehicle with two electric motors in the rear axle. In order to make a turn in the vehicle a differential speed in the motors is needed. A detailed ...
Hidalgo, H.; Huerta, H. (Universitat Politècnica de València, 2021-04-06)[EN] In this paper, a control scheme to regulate the speed in an electric vehicle with two electric motors in the rear axle. In order to make a turn in the vehicle a differential speed in the motors is needed. A detailed ... -
 Rascón, Raúl; Álvarez, Joaquín; Aguilar, Luis T. (Elsevier, 2014-07-06)[ES] Se presenta una estrategia de control que combina las técnicas de modos deslizantes y control H∞, para regular la posición de un sistema mecánico subactuado con fricción y con una holgura elástica. Se muestra que el ...
Rascón, Raúl; Álvarez, Joaquín; Aguilar, Luis T. (Elsevier, 2014-07-06)[ES] Se presenta una estrategia de control que combina las técnicas de modos deslizantes y control H∞, para regular la posición de un sistema mecánico subactuado con fricción y con una holgura elástica. Se muestra que el ... -
 Rosas Almeida, David Isaías; Cantú Cárdenas, Jesús Armando; Ocampo Díaz, Juan de Dios; Muñiz Valdez, Héctor (Universitat Politècnica de València, 2019-03-20)[EN] We propose a strategy to solve the tracking control problem for uncertain pneumatic systems and with partial state measurement. The strategy is based on the Active Disturbance Rejection Control structure (ADRC), which ...
Rosas Almeida, David Isaías; Cantú Cárdenas, Jesús Armando; Ocampo Díaz, Juan de Dios; Muñiz Valdez, Héctor (Universitat Politècnica de València, 2019-03-20)[EN] We propose a strategy to solve the tracking control problem for uncertain pneumatic systems and with partial state measurement. The strategy is based on the Active Disturbance Rejection Control structure (ADRC), which ... -
 Hoyo Sánchez, Ángeles; Guzmán Sánchez, José Luis; Moreno Úbeda, José Carlos; Baños Torrico, Alfonso (Universitat Politècnica de València, 2022-06-29)[EN] This work presents a first approach to the robust control of pH in a raceway photobioreactor for the cultivation of microalgae. In this type of process, pH is the most critical variable to control, having a direct ...
Hoyo Sánchez, Ángeles; Guzmán Sánchez, José Luis; Moreno Úbeda, José Carlos; Baños Torrico, Alfonso (Universitat Politècnica de València, 2022-06-29)[EN] This work presents a first approach to the robust control of pH in a raceway photobioreactor for the cultivation of microalgae. In this type of process, pH is the most critical variable to control, having a direct ... -
 Alazki, Hussain; Cortés-Vega, David; García, Pedro (Universitat Politècnica de València, 2023-09-21)[EN] Diatebes mellitus type 1 (T1DM) requires an strict control for insulin delivery to avoid severe consequences derived from hiperglycemia and hipoglycemia. The concept of an artificial pancreas allows the automation of ...
Alazki, Hussain; Cortés-Vega, David; García, Pedro (Universitat Politècnica de València, 2023-09-21)[EN] Diatebes mellitus type 1 (T1DM) requires an strict control for insulin delivery to avoid severe consequences derived from hiperglycemia and hipoglycemia. The concept of an artificial pancreas allows the automation of ... -
 Baquero-Suárez, Mauro; Cortes-Romero, John; Arcos-Legarda, Jaime; Coral-Enriquez, Horacio (Universitat Politècnica de València, 2017-12-05)[ES] Este trabajo propone una estrategia de Control por Rechazo Activo de Perturbaciones (ADRC), usando observadores extendidos de perturbación, para estabilizar una bicicleta en movimiento, sin conductor y con una velocidad ...
Baquero-Suárez, Mauro; Cortes-Romero, John; Arcos-Legarda, Jaime; Coral-Enriquez, Horacio (Universitat Politècnica de València, 2017-12-05)[ES] Este trabajo propone una estrategia de Control por Rechazo Activo de Perturbaciones (ADRC), usando observadores extendidos de perturbación, para estabilizar una bicicleta en movimiento, sin conductor y con una velocidad ... -
 Gracia Calandin, Luis Ignacio; Solanes Galbis, Juan Ernesto; Muñoz-Benavent, Pau; Valls Miro, Jaime; Perez-Vidal, Carlos; Tornero Montserrat, Josep (John Benjamins Publishing Company, 2019)[EN] This paper presents a human-robot closely collaborative solution to cooperatively perform surface treatment tasks such as polishing, grinding, finishing, deburring, etc. The proposed scheme is based on task priority ...
Gracia Calandin, Luis Ignacio; Solanes Galbis, Juan Ernesto; Muñoz-Benavent, Pau; Valls Miro, Jaime; Perez-Vidal, Carlos; Tornero Montserrat, Josep (John Benjamins Publishing Company, 2019)[EN] This paper presents a human-robot closely collaborative solution to cooperatively perform surface treatment tasks such as polishing, grinding, finishing, deburring, etc. The proposed scheme is based on task priority ... -
 Robles, Ruben; Sala, Antonio; Bernal, Miguel (John Wiley & Sons, 2019-03-25)[EN] Polytopic quasi¿linear parameter¿varying (quasi¿LPV) models of nonlinear processes allow the usage linear matrix inequalities (LMIs) to guarantee some performance goal on them (in most cases, locally, over a so¿called ...
Robles, Ruben; Sala, Antonio; Bernal, Miguel (John Wiley & Sons, 2019-03-25)[EN] Polytopic quasi¿linear parameter¿varying (quasi¿LPV) models of nonlinear processes allow the usage linear matrix inequalities (LMIs) to guarantee some performance goal on them (in most cases, locally, over a so¿called ... -
 García Fernández, Alberto (Universitat Politècnica de València, 2023-10-20)[ES] La presente tesis aborda la Interacción Humano-Robot para tareas industriales de tratamiento superficial, con el objetivo de obtener una verdadera sinergia entre el operador humano y el sistema robotizado, así como ...
García Fernández, Alberto (Universitat Politècnica de València, 2023-10-20)[ES] La presente tesis aborda la Interacción Humano-Robot para tareas industriales de tratamiento superficial, con el objetivo de obtener una verdadera sinergia entre el operador humano y el sistema robotizado, así como ... -
 Sanz Diaz, Ricardo; García Gil, Pedro José; Fridman, Emilia; Albertos Pérez, Pedro (Taylor & Francis, 2020-02-01)[EN] This paper deals with asymptotic stabilisation of a class of nonlinear input-delayed systems via dynamic output feedback in the presence of disturbances. The proposed strategy has the structure of an observer-based ...
Sanz Diaz, Ricardo; García Gil, Pedro José; Fridman, Emilia; Albertos Pérez, Pedro (Taylor & Francis, 2020-02-01)[EN] This paper deals with asymptotic stabilisation of a class of nonlinear input-delayed systems via dynamic output feedback in the presence of disturbances. The proposed strategy has the structure of an observer-based ... -
 Carrillo Ahumada, J.; Reynoso Meza, G.; Sanchís Saez, Javier; García Nieto, S.; García Alvarado, M.A. (Universitat Politècnica de València, 2015-04-12)[ES] La sintonización de controladores Pareto-óptimo robustos ha sido empleada para mejorar el rendimiento de un helicóptero de dos grados de libertad con un algoritmo de control lineal. El procedimiento de sintonización ...
Carrillo Ahumada, J.; Reynoso Meza, G.; Sanchís Saez, Javier; García Nieto, S.; García Alvarado, M.A. (Universitat Politècnica de València, 2015-04-12)[ES] La sintonización de controladores Pareto-óptimo robustos ha sido empleada para mejorar el rendimiento de un helicóptero de dos grados de libertad con un algoritmo de control lineal. El procedimiento de sintonización ... -
 Muñoz-Benavent, Pau; Gracia, Luis; Solanes, J. Ernesto; Esparza, Alicia; Tornero, Josep (John Wiley & Sons, 2018)[EN] An approach based on sliding mode is proposed in this work for reference tracking in robot visual servoing. In particular, 2 sliding mode controls are obtained depending on whether joint accelerations or joint jerks ...
Muñoz-Benavent, Pau; Gracia, Luis; Solanes, J. Ernesto; Esparza, Alicia; Tornero, Josep (John Wiley & Sons, 2018)[EN] An approach based on sliding mode is proposed in this work for reference tracking in robot visual servoing. In particular, 2 sliding mode controls are obtained depending on whether joint accelerations or joint jerks ...
Mostrando ítems 1-20 de 23

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
