


Listar por palabra clave "Nonlinear control"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por palabra clave
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por palabra clave "Nonlinear control"
Mostrando ítems 1-18 de 18
-
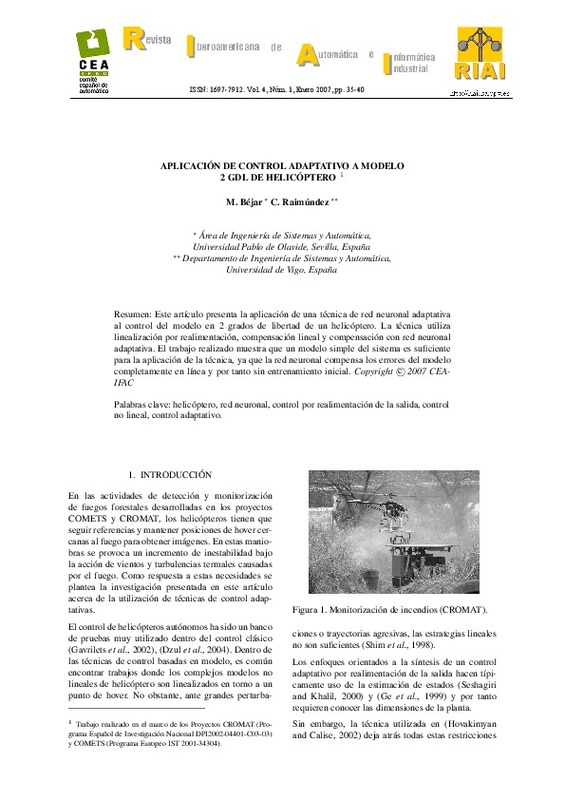 Béjar, M.; Raimúndez, C. (Universitat Politècnica de València, 2009-12-02)[ES] Este artículo presenta la aplicación de una técnica de red neuronal adaptativa al control del modelo en 2 grados de libertad de un helicóptero. La técnica utiliza linealización por realimentación, compensación lineal ...
Béjar, M.; Raimúndez, C. (Universitat Politècnica de València, 2009-12-02)[ES] Este artículo presenta la aplicación de una técnica de red neuronal adaptativa al control del modelo en 2 grados de libertad de un helicóptero. La técnica utiliza linealización por realimentación, compensación lineal ... -
 Rodríguez, Federico; Garrido, Daniel Oscar; Núñez, Rubén Orlando; Oggier, Germán Gustavo; García, Guillermo Oscar (Universitat Politècnica de València, 2023-01-23)[ES] Este trabajo presenta una estrategia de control basada en la técnica de linealización por realimentación para regular la tensión a bornes de una carga de potencia constante alimentada por un Convertidor con Puentes ...
Rodríguez, Federico; Garrido, Daniel Oscar; Núñez, Rubén Orlando; Oggier, Germán Gustavo; García, Guillermo Oscar (Universitat Politècnica de València, 2023-01-23)[ES] Este trabajo presenta una estrategia de control basada en la técnica de linealización por realimentación para regular la tensión a bornes de una carga de potencia constante alimentada por un Convertidor con Puentes ... -
 Santos Navarro, Fernando Nóbel (Universitat Politècnica de València, 2016-12-28)[ES] A efectos de maximizar el rendimiento y productividad de los bioprocesos, la biotecnología industrial actual ha de hacer frente a problemas críticos, como son el modelado, la estimación de variables clave, y el ...
Santos Navarro, Fernando Nóbel (Universitat Politècnica de València, 2016-12-28)[ES] A efectos de maximizar el rendimiento y productividad de los bioprocesos, la biotecnología industrial actual ha de hacer frente a problemas críticos, como son el modelado, la estimación de variables clave, y el ... -
 Rossomando, Francisco G.; Soria, Carlos; Carelli, Ricardo (Universitat Politècnica de València, 2010-10-08)[ES] En este trabajo se presenta un control de seguimiento de trayectorias de robots móviles. La estructura de control propuesta combina una linealización por realimentación basada en el modelo cinemático nominal, y una ...
Rossomando, Francisco G.; Soria, Carlos; Carelli, Ricardo (Universitat Politècnica de València, 2010-10-08)[ES] En este trabajo se presenta un control de seguimiento de trayectorias de robots móviles. La estructura de control propuesta combina una linealización por realimentación basada en el modelo cinemático nominal, y una ... -
 Saludes Rodil, Sergio; Fuente, M. J. (Universitat Politècnica de València, 2009-12-02)[ES] Este artículo trata sobre el control IMC no lineal y un método para hacerlo tolerante a los fallos en la planta. El control IMC no lineal se consigue por medio de modelos no lineales de la planta y de la inversa de ...
Saludes Rodil, Sergio; Fuente, M. J. (Universitat Politècnica de València, 2009-12-02)[ES] Este artículo trata sobre el control IMC no lineal y un método para hacerlo tolerante a los fallos en la planta. El control IMC no lineal se consigue por medio de modelos no lineales de la planta y de la inversa de ... -
 Vacca Sisterna, Carlos; Serrano, Emanuel; Scaglia, Gustavo; Rossomando, Francisco (Universitat Politècnica de València, 2021-12-17)[EN] This work proposes the design of an adaptive controller for a marine vessel; the proposed control strategy applies a controller designed on linear algebra for the kinematics and an adaptive control technique for the ...
Vacca Sisterna, Carlos; Serrano, Emanuel; Scaglia, Gustavo; Rossomando, Francisco (Universitat Politècnica de València, 2021-12-17)[EN] This work proposes the design of an adaptive controller for a marine vessel; the proposed control strategy applies a controller designed on linear algebra for the kinematics and an adaptive control technique for the ... -
 Chaos, Dictino; Moreno Salinas, David; Muñoz, Rocío; Aranda, Joaquín (Universitat Politècnica de València, 2013-10-13)[ES] Este artículo aborda el problema de seguimiento de trayectoria de un aerodeslizador subactuado. Esta clase de sistemas es difícil de controlar debido a que su movimiento está sujeto a una restricción no holonómica de ...
Chaos, Dictino; Moreno Salinas, David; Muñoz, Rocío; Aranda, Joaquín (Universitat Politècnica de València, 2013-10-13)[ES] Este artículo aborda el problema de seguimiento de trayectoria de un aerodeslizador subactuado. Esta clase de sistemas es difícil de controlar debido a que su movimiento está sujeto a una restricción no holonómica de ... -
 Vignoni, Alejandro (Universitat Politècnica de València, 2011-11-14)This work proposes a novel methodology for coordination of dynamical systems. The scheme is based on the sliding mode reference conditioning technique in two main configurations: a sort of global supervisory level in one ...
Vignoni, Alejandro (Universitat Politècnica de València, 2011-11-14)This work proposes a novel methodology for coordination of dynamical systems. The scheme is based on the sliding mode reference conditioning technique in two main configurations: a sort of global supervisory level in one ... -
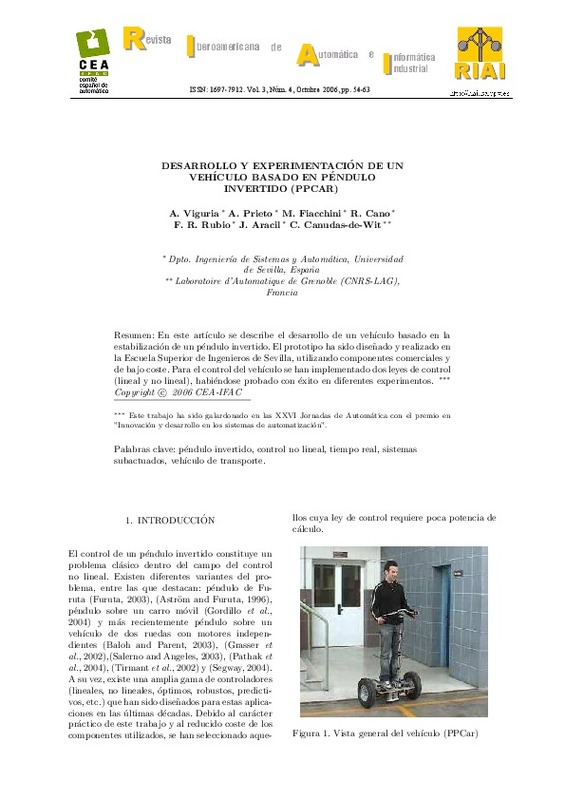 Viguria, A.; Prieto, A.; Fiacchini, M.; Cano, R.; Rubio, F. R.; Aracil, J.; Canudas-de-Wit, C. (Universitat Politècnica de València, 2009-12-03)[EN] This paper describes the development of a vehicle based on the stabilization of an inverted pendulum. The prototype has been designed and developed by the School of Engineering of Seville using commercial and low-cost ...
Viguria, A.; Prieto, A.; Fiacchini, M.; Cano, R.; Rubio, F. R.; Aracil, J.; Canudas-de-Wit, C. (Universitat Politècnica de València, 2009-12-03)[EN] This paper describes the development of a vehicle based on the stabilization of an inverted pendulum. The prototype has been designed and developed by the School of Engineering of Seville using commercial and low-cost ... -
 Kunusch, Cristian; Puleston, Paul F.; Mayosky, Miguel A. (Universitat Politècnica de València, 2008-07-09)[EN] In this work, a comparative study of three different second order sliding mode algorithms is performed. These controllers are used to solve the breathing problem of a PEM fuel cell stack. The designed algorithms are ...
Kunusch, Cristian; Puleston, Paul F.; Mayosky, Miguel A. (Universitat Politècnica de València, 2008-07-09)[EN] In this work, a comparative study of three different second order sliding mode algorithms is performed. These controllers are used to solve the breathing problem of a PEM fuel cell stack. The designed algorithms are ... -
 De Battista, Hernán; Jamilis, M.; Garelli, Fabricio; Picó, Jesús (Elsevier, 2018-03)[EN] This work revisits the dynamic behaviour of stirred continuous reactors in which a single bioreaction with unknown kinetics occurs. Conditions on the feeding strategy to avoid washing out the biomass and falling in ...
De Battista, Hernán; Jamilis, M.; Garelli, Fabricio; Picó, Jesús (Elsevier, 2018-03)[EN] This work revisits the dynamic behaviour of stirred continuous reactors in which a single bioreaction with unknown kinetics occurs. Conditions on the feeding strategy to avoid washing out the biomass and falling in ... -
 Cerrada Collado, Cristina; Chaos García, Dictino; Moreno-Salinas, David; Aranda Almansa, Joaquín (Universitat Politècnica de València, 2023-09-29)[EN] The present paper presents a optimization problem of a control law to minimize the integral square error produced by driving an AUV (Autonomous Underwater Vehicle) using a single thruster from a start point to a desired ...
Cerrada Collado, Cristina; Chaos García, Dictino; Moreno-Salinas, David; Aranda Almansa, Joaquín (Universitat Politècnica de València, 2023-09-29)[EN] The present paper presents a optimization problem of a control law to minimize the integral square error produced by driving an AUV (Autonomous Underwater Vehicle) using a single thruster from a start point to a desired ... -
 Martinez Salamero, L.; Cid Pastor, A.; El Aroudi, A.; Giral, R.; Calvente, Javier (Universitat Politècnica de València, 2009-10-08)[ES] En este trabajo se presenta de forma tutorial los conceptos básicos de modelado y control de convertidores conmutados continua-continua. Tras definir la Electrónica de Potencia y su dominio de utilización, se presenta ...
Martinez Salamero, L.; Cid Pastor, A.; El Aroudi, A.; Giral, R.; Calvente, Javier (Universitat Politècnica de València, 2009-10-08)[ES] En este trabajo se presenta de forma tutorial los conceptos básicos de modelado y control de convertidores conmutados continua-continua. Tras definir la Electrónica de Potencia y su dominio de utilización, se presenta ... -
 Benamar, Abdelkarim; Travaillé, Pierre; Clairand Gómez, Jean-Michel; Escrivá-Escrivá, Guillermo (Indonesian Society for Knowledge and Human Development, 2020)[EN] Environmental concerns push governments to invest in renewable energy (RE). They are natural sources with a low carbon footprint and do not pollute locally. However, it is technically difficult to deploy high penetration ...
Benamar, Abdelkarim; Travaillé, Pierre; Clairand Gómez, Jean-Michel; Escrivá-Escrivá, Guillermo (Indonesian Society for Knowledge and Human Development, 2020)[EN] Environmental concerns push governments to invest in renewable energy (RE). They are natural sources with a low carbon footprint and do not pollute locally. However, it is technically difficult to deploy high penetration ... -
De Battista, Hernán; Picó, Jesús; Picó Marco, Enric (ELSEVIER SCI LTD, 2012-04)[EN] This paper deals with the regulation of the biomass specific growth rate, which is an important goal in many fed-batch fermentation processes. The proposed control system is based on the minimal model paradigm, requiring ...
-
 Solanes Galbis, Juan Ernesto; Muñoz Benavent, Pau; Girbés, Vicent; Armesto Ángel, Leopoldo; Tornero Montserrat, Josep (Cambridge University Press, 2015-06-11)It is well known that the use of multi-rate control techniques have improved the performance of many systems in general, and robotic systems, in particular. The main contribution of this paper is the generalization of the ...
Solanes Galbis, Juan Ernesto; Muñoz Benavent, Pau; Girbés, Vicent; Armesto Ángel, Leopoldo; Tornero Montserrat, Josep (Cambridge University Press, 2015-06-11)It is well known that the use of multi-rate control techniques have improved the performance of many systems in general, and robotic systems, in particular. The main contribution of this paper is the generalization of the ... -
 Guerrero Castellanos, J.F.; Villarreal Cervantes, M.G.; Sánchez Santana, J.P.; Ramírez Martínez, S. (Elsevier, 2014-10-05)[EN] The present work deals with the tracking problem of a mobile robot (3,0) based on the kinematic model and proposes a control strategy that takes into account a priori input signals bounds i.e. the linear and angular ...
Guerrero Castellanos, J.F.; Villarreal Cervantes, M.G.; Sánchez Santana, J.P.; Ramírez Martínez, S. (Elsevier, 2014-10-05)[EN] The present work deals with the tracking problem of a mobile robot (3,0) based on the kinematic model and proposes a control strategy that takes into account a priori input signals bounds i.e. the linear and angular ... -
 Muñoz-Benavent, Pau; Gracia, Luis; Solanes, J. Ernesto; Esparza, Alicia; Tornero, Josep (John Wiley & Sons, 2018)[EN] An approach based on sliding mode is proposed in this work for reference tracking in robot visual servoing. In particular, 2 sliding mode controls are obtained depending on whether joint accelerations or joint jerks ...
Muñoz-Benavent, Pau; Gracia, Luis; Solanes, J. Ernesto; Esparza, Alicia; Tornero, Josep (John Wiley & Sons, 2018)[EN] An approach based on sliding mode is proposed in this work for reference tracking in robot visual servoing. In particular, 2 sliding mode controls are obtained depending on whether joint accelerations or joint jerks ...
Mostrando ítems 1-18 de 18

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
