


Listar por palabra clave "Restricciones"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por palabra clave
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por palabra clave "Restricciones"
Mostrando ítems 1-20 de 35
-
 Gastaldi Moscardó, Luis (Universitat Politècnica de València, 2021-09-07)[ES] A finales del año 2019 en China aparece un nuevo virus. Este sería el causante del conocido como COVID-19, el virus llevó al país a una situación nueva hasta el momento que más tarde se expandiría por Europa y el ...
Gastaldi Moscardó, Luis (Universitat Politècnica de València, 2021-09-07)[ES] A finales del año 2019 en China aparece un nuevo virus. Este sería el causante del conocido como COVID-19, el virus llevó al país a una situación nueva hasta el momento que más tarde se expandiría por Europa y el ... -
 Control Predictivo Min-Max Multimodelo con Restricciones, Validado sobre una Planta de Laboratorio Alvarez, Teresa; Cuesta, José; Ontoria, Mónica; Tadeo, Fernando; Martín, J. V.; Allwright, J. C. (Universitat Politècnica de València, 2010-01-07)[EN] A Min-Max Predictive Controller is developed and implemented on a laboratory plant. Some modifications of the previous formulations in the literature needed to make feasible the implementation on real systems are ...
Control Predictivo Min-Max Multimodelo con Restricciones, Validado sobre una Planta de Laboratorio Alvarez, Teresa; Cuesta, José; Ontoria, Mónica; Tadeo, Fernando; Martín, J. V.; Allwright, J. C. (Universitat Politècnica de València, 2010-01-07)[EN] A Min-Max Predictive Controller is developed and implemented on a laboratory plant. Some modifications of the previous formulations in the literature needed to make feasible the implementation on real systems are ... -
 Camacho, Eduardo F.; Bordons, Carlos (Universitat Politècnica de València, 2010-10-01)[ES] El control predictivo basado en modelo (Model Predictive Control, MPC ) se ha desarrollado considerablemente en las últimas décadas tanto en la industria como en la comunidad de investigación. Este éxito se debe a que ...
Camacho, Eduardo F.; Bordons, Carlos (Universitat Politècnica de València, 2010-10-01)[ES] El control predictivo basado en modelo (Model Predictive Control, MPC ) se ha desarrollado considerablemente en las últimas décadas tanto en la industria como en la comunidad de investigación. Este éxito se debe a que ... -
 Vivo Sánchez, Sergio (Universitat Politècnica de València, 2021-09-20)[ES] Descripción del proceso completo de diseño, desarrollo, puesta en marcha y validación de un planificador inteligente de atraques para la terminal de contenedores Malta Freeport, útil en la toma de decisiones y en la ...
Vivo Sánchez, Sergio (Universitat Politècnica de València, 2021-09-20)[ES] Descripción del proceso completo de diseño, desarrollo, puesta en marcha y validación de un planificador inteligente de atraques para la terminal de contenedores Malta Freeport, útil en la toma de decisiones y en la ... -
 Marco Soldevila, Blanca (Universitat Politècnica de València, 2021-09-07)[ES] A partir del 14 de marzo y tras la extensión de la pandemia global producida por el COVID-19, se articulan, primeramente, por la administración central y posteriormente por el resto de las administraciones un conjunto ...
Marco Soldevila, Blanca (Universitat Politècnica de València, 2021-09-07)[ES] A partir del 14 de marzo y tras la extensión de la pandemia global producida por el COVID-19, se articulan, primeramente, por la administración central y posteriormente por el resto de las administraciones un conjunto ... -
Berriel Rivera, Héctor Israel (Universitat Politècnica de València, 2022-09-06)[ES] En España el sector del turismo, hasta el año 2019, era el sector que más aportaba al PIB con un 14,9% del total y, dentro de este sector, un factor muy importante era la hostelería. Así, la hostelería creaba mucha ...
-
 Salcedo Romero de Ávila, José Vicente (Universitat Politècnica de València, 2008-05-06)En esta tesis doctoral se aborda el control de sistemas no lineales mediante el empleo de controladores predictivos generalizados (GPCs) en espacio de estados. En primer lugar se realiza una revisión de la metodología de ...
Salcedo Romero de Ávila, José Vicente (Universitat Politècnica de València, 2008-05-06)En esta tesis doctoral se aborda el control de sistemas no lineales mediante el empleo de controladores predictivos generalizados (GPCs) en espacio de estados. En primer lugar se realiza una revisión de la metodología de ... -
 Manclús Gimeno, Elena (Universitat Politècnica de València, 2020-04-08)[ES] El objetivo de esta investigación es estudiar la flexibilidad del potencial proporcionado por los sistemas power to heat para el funcionamiento y operación del sistema de energía. Para este fin, se desarrollará un ...
Manclús Gimeno, Elena (Universitat Politècnica de València, 2020-04-08)[ES] El objetivo de esta investigación es estudiar la flexibilidad del potencial proporcionado por los sistemas power to heat para el funcionamiento y operación del sistema de energía. Para este fin, se desarrollará un ... -
 Braquehais Acero, Víctor (Universitat Politècnica de València, 2008-01-09)Descripción de la estructura de una base de datos relacional y las técnicas para obtenerla
Braquehais Acero, Víctor (Universitat Politècnica de València, 2008-01-09)Descripción de la estructura de una base de datos relacional y las técnicas para obtenerla -
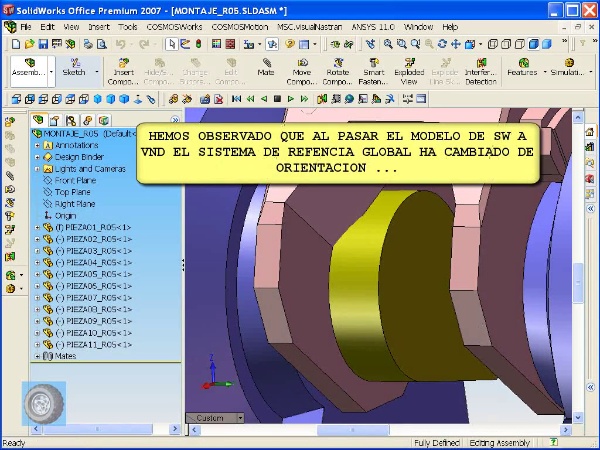
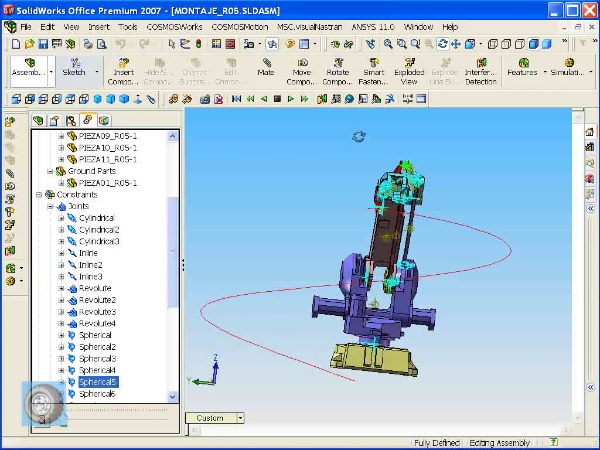
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 01 DE 07 - MONTAJE DE LAS TRES PRIMERAS PIEZAS - Partiendo del modelo geométrico del robot en SW (Solidworks), en esta presentación vamos a mostrar como crear un modelo cinemático operativo en el entorno del programa ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 01 DE 07 - MONTAJE DE LAS TRES PRIMERAS PIEZAS - Partiendo del modelo geométrico del robot en SW (Solidworks), en esta presentación vamos a mostrar como crear un modelo cinemático operativo en el entorno del programa ... -
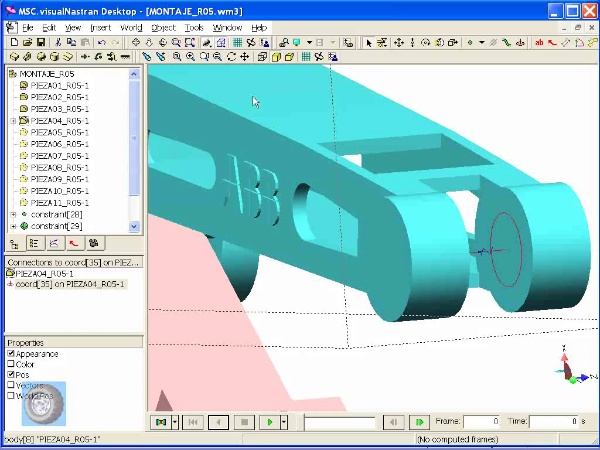
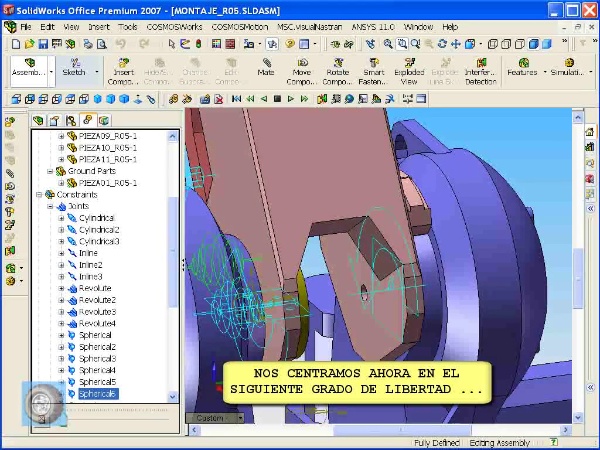
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 02 DE 07 - MONTAJE DE LA CUARTA PIEZA Y ELIMINACION DE RESTRICCIONES EN EXCESO - En este tramo vamos a insertar en el modelo cinemático la cuarta pieza y eliminaremos todas las restricciones en exceso, utilizando ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 02 DE 07 - MONTAJE DE LA CUARTA PIEZA Y ELIMINACION DE RESTRICCIONES EN EXCESO - En este tramo vamos a insertar en el modelo cinemático la cuarta pieza y eliminaremos todas las restricciones en exceso, utilizando ... -
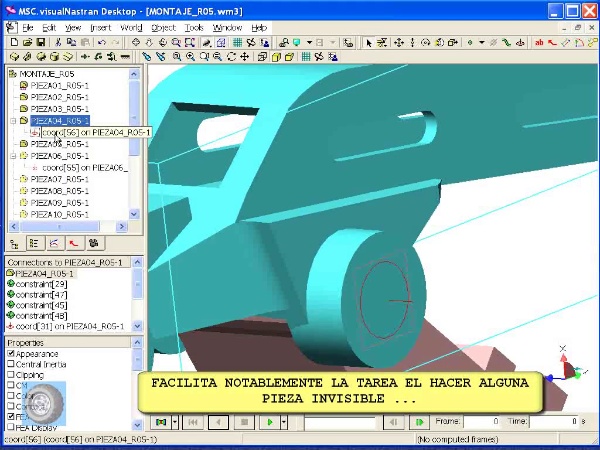
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 03 DE 07 - MONTAJE DE LAS PIEZAS CINCO Y SEIS Y ELIMINACION DE RESTRICCIONES EN EXCESO - En este tramo montaremos las piezas cinco y seis. Empezaremos ubicando los "Coord" necesarios. Par ubicar los "Coord" de la ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 03 DE 07 - MONTAJE DE LAS PIEZAS CINCO Y SEIS Y ELIMINACION DE RESTRICCIONES EN EXCESO - En este tramo montaremos las piezas cinco y seis. Empezaremos ubicando los "Coord" necesarios. Par ubicar los "Coord" de la ... -
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 04 DE 07 - MONTAJE DE LA PIEZA SIETE Y ELIMINACION DE RESTRICCIONES EN EXCESO - En este tramo vamos a insertar en el modelo cinemático la pieza siete. Definiendo los pares de tal forma que no existan restricciones ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 04 DE 07 - MONTAJE DE LA PIEZA SIETE Y ELIMINACION DE RESTRICCIONES EN EXCESO - En este tramo vamos a insertar en el modelo cinemático la pieza siete. Definiendo los pares de tal forma que no existan restricciones ... -
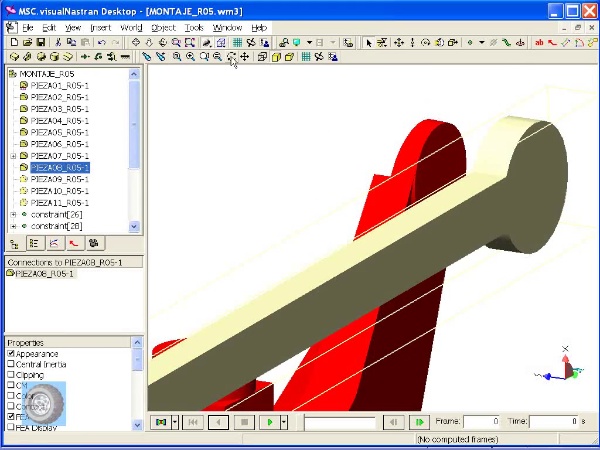 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 05 DE 07 - MONTAJE DE LA PIEZA OCHO Y ELIMINACION DE RESTRICCIONES EN EXCESO - En este tramo vamos a insertar en el modelo cinemático la pieza ocho. Redefiniendo adecuadamente los pares cinemáticos para enviar la ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 05 DE 07 - MONTAJE DE LA PIEZA OCHO Y ELIMINACION DE RESTRICCIONES EN EXCESO - En este tramo vamos a insertar en el modelo cinemático la pieza ocho. Redefiniendo adecuadamente los pares cinemáticos para enviar la ... -
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 06 DE 07 - MONTAJE DE LAS PIEZAS NUEVE Y DIEZ Y ELIMINACION DE RESTRICCIONES EN EXCESO - En este tramo vamos a insertar en el modelo cinemático las piezas nueve y diez, redefiniendo los tipos de los pares cinemáticos, ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 06 DE 07 - MONTAJE DE LAS PIEZAS NUEVE Y DIEZ Y ELIMINACION DE RESTRICCIONES EN EXCESO - En este tramo vamos a insertar en el modelo cinemático las piezas nueve y diez, redefiniendo los tipos de los pares cinemáticos, ... -
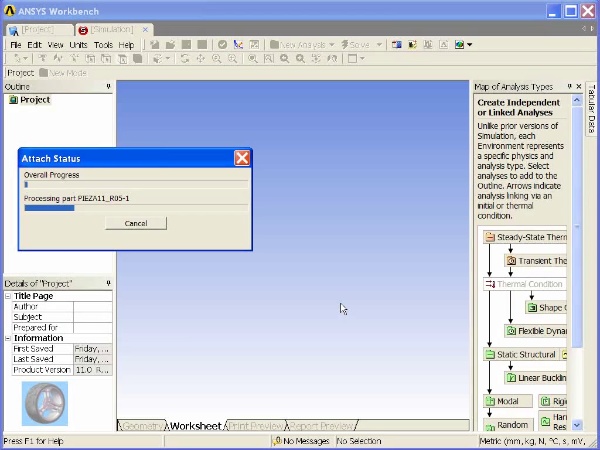
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 07 DE 07 - MONTAJE DE LA PIEZA ONCE Y DEFINICION DE MOVIMIENTO EN LOS GRADOS DE LIBERTAD DEL MODELO - En este último tramo de la presentación procederemos a insertar en el modelo cinemático la última de las piezas y ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 07 DE 07 - MONTAJE DE LA PIEZA ONCE Y DEFINICION DE MOVIMIENTO EN LOS GRADOS DE LIBERTAD DEL MODELO - En este último tramo de la presentación procederemos a insertar en el modelo cinemático la última de las piezas y ... -
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 01 DE 07 - MONTAJE DE LAS DOS PRIMERAS PIEZAS - Partiendo del modelo montado en Solidworks y simulado cinemáticamente mediante "Cosmos Motion", en este tramo y los que siguen se va a mostrar como simular cinemáticamente ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 01 DE 07 - MONTAJE DE LAS DOS PRIMERAS PIEZAS - Partiendo del modelo montado en Solidworks y simulado cinemáticamente mediante "Cosmos Motion", en este tramo y los que siguen se va a mostrar como simular cinemáticamente ... -
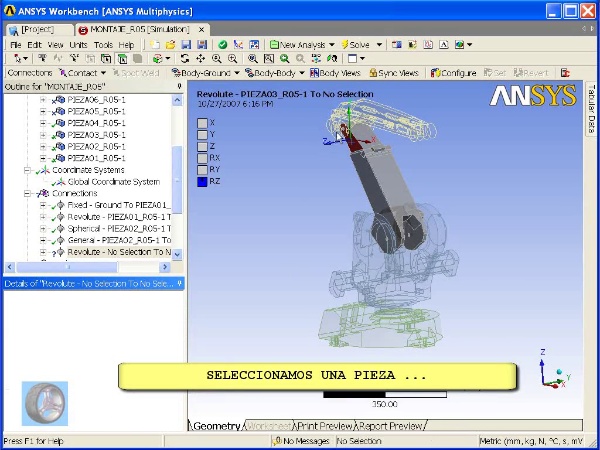
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 02 DE 07 - MONTAJE DE LA TERCERA PIEZA Y ELIMINACION RESTRICCIONES EN EXCESO - En este tramo procederemos a insertar en el modelo cinemático la pieza 03, a definir los pares cinemáticos en los lugares en los que tiene ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 02 DE 07 - MONTAJE DE LA TERCERA PIEZA Y ELIMINACION RESTRICCIONES EN EXCESO - En este tramo procederemos a insertar en el modelo cinemático la pieza 03, a definir los pares cinemáticos en los lugares en los que tiene ... -
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 03 DE 07 - MONTAJE DE LA CUARTA Y QUINTA PIEZAS Y ELIMINACION RESTRICCIONES EN EXCESO - En este tramo procederemos a insertar en el modelo cinemático las piezas 04 y 05, a definir los pares cinemáticos en los lugares ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 03 DE 07 - MONTAJE DE LA CUARTA Y QUINTA PIEZAS Y ELIMINACION RESTRICCIONES EN EXCESO - En este tramo procederemos a insertar en el modelo cinemático las piezas 04 y 05, a definir los pares cinemáticos en los lugares ... -
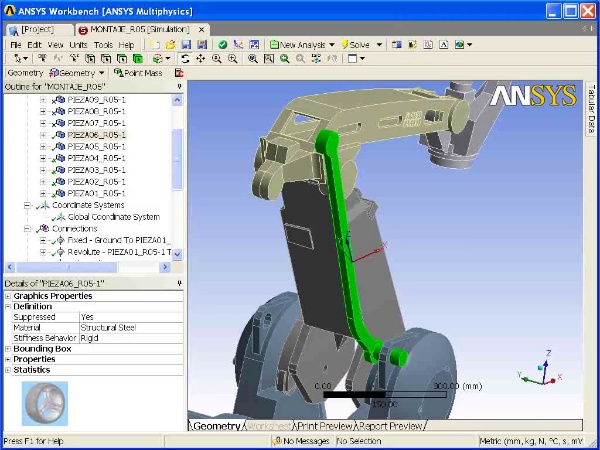 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 04 DE 07 - MONTAJE DE LA SEXTA Y SEPTIMA PIEZAS Y ELIMINACION RESTRICCIONES EN EXCESO - En esta tramo se procede a insertar en el modelo cinemático las piezas 06 y 07, definiendo pares cinemáticos en los lugares que ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 04 DE 07 - MONTAJE DE LA SEXTA Y SEPTIMA PIEZAS Y ELIMINACION RESTRICCIONES EN EXCESO - En esta tramo se procede a insertar en el modelo cinemático las piezas 06 y 07, definiendo pares cinemáticos en los lugares que ...
Mostrando ítems 1-20 de 35

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
