


Análisis de Datos 3D Para Generación Automática de Modelos BIM de Interiores Habitados
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Estadísticas
Ayuda RiuNet
Admin. UPV



Análisis de Datos 3D Para Generación Automática de Modelos BIM de Interiores Habitados
Mostrar el registro sencillo del ítem
Ficheros en el ítem
| dc.contributor.author | Adán, A.
|
es_ES |
| dc.contributor.author | Huber, D.
|
es_ES |
| dc.date.accessioned | 2020-05-27T14:56:03Z | |
| dc.date.available | 2020-05-27T14:56:03Z | |
| dc.date.issued | 2011-10-05 | |
| dc.identifier.issn | 1697-7912 | |
| dc.identifier.uri | http://hdl.handle.net/10251/144434 | |
| dc.description.abstract | [EN] In this paper we present a method for the reconstruction of interiors using a set of panoramic range data in scenes with clutter and occlusion. Although the ultimate goal of our project is to obtain automated Building Information Models of facilities, here we specifically deal with the reconstruction of simply-shaped wide areas (such as walls, ceilings and floors) behind furniture and facility pieces in interiors. Our approach is based on a sequential updating labeling strategy in different data representation spaces. A volumetric representation is used to permit the labeling of the 3D space for different range data and the fusion of all the scene’s labels to obtain one single 2D labeling image for each of the simply-shaped wide areas of the room. Based on this labeling process, our method is able both to identify the occluded regions in the wall and, through a learning technique, to infer essential parts, such as doors, windows and closets. This method was tested under difficult clutter and occlusion conditions, yielding promising results. Scans were obtained using a state of the art laser scanner operated by a professional 3D scanning service provider. | es_ES |
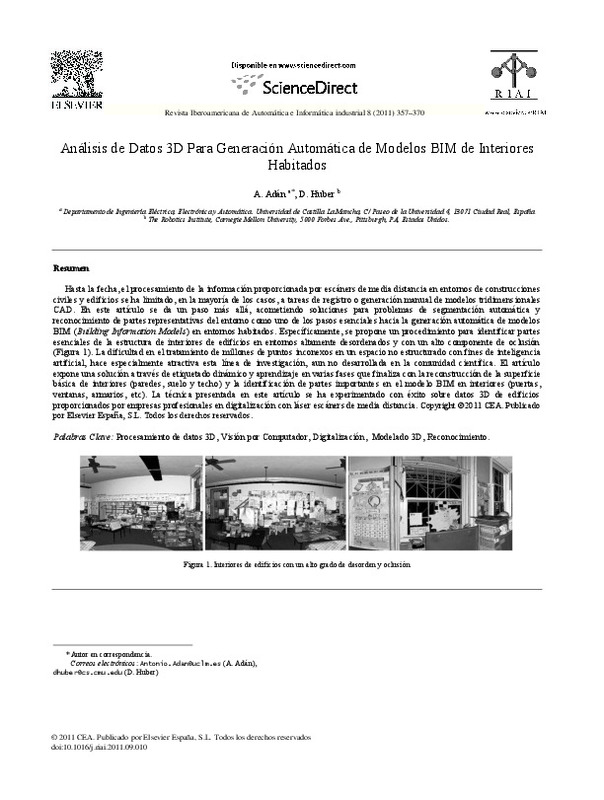
| dc.description.abstract | [ES] Hasta la fecha, el procesamiento de la información proporcionada por escáners de media distancia en entornos de construcciones civiles y edificios se ha limitado, en la mayoría de los casos, a tareas de registro o generación manual de modelos tridimensionales CAD. En este artículo se da un paso más allá, acometiendo soluciones para problemas de segmentación automática y reconocimiento de partes representativas del entorno como uno de los pasos esenciales hacia la generación automática de modelos BIM (Building Information Models) en entornos habitados. Específicamente, se propone un procedimiento para identificar partes esenciales de la estructura de interiores de edificios en entornos altamente desordenados y con un alto componente de oclusión (Figura 1). La dificultad en el tratamiento de millones de puntos inconexos en un espacio no estructurado con fines de inteligencia artificial, hace especialmente atractiva esta línea de investigación, aun no desarrollada en la comunidad científica. El artículo expone una solución a través de etiquetado dinámico y aprendizaje en varias fases que finaliza con la reconstrucción de la superficie básica de interiores (paredes, suelo y techo) y la identificación de partes importantes en el modelo BIM en interiores (puertas, ventanas, armarios, etc). La técnica presentada en este artículo se ha experimentado con éxito sobre datos 3D de edificios proporcionados por empresas profesionales en digitalización con láser escáners de media distancia. | es_ES |
| dc.description.sponsorship | Este trabajo ha sido realizado bajo financiación del National Science Foundation (NSF) de Estados Unidos en el proyecto “Automating the Creation of As-built Building Information Models” CMMI-0856558 , desarrollado en la Universidad de Carnegie Mellon, Pittsburgh, PA, USA. " | es_ES |
| dc.language | Español | es_ES |
| dc.publisher | Elsevier | es_ES |
| dc.relation.ispartof | Revista Iberoamericana de Automática e Informática industrial | es_ES |
| dc.rights | Reserva de todos los derechos | es_ES |
| dc.subject | 3D Data Processing | es_ES |
| dc.subject | Computer Vision | es_ES |
| dc.subject | Digitizers | es_ES |
| dc.subject | 3D Modeling | es_ES |
| dc.subject | Recognition | es_ES |
| dc.subject | Procesamiento de datos 3D | es_ES |
| dc.subject | Visión por Computador | es_ES |
| dc.subject | Digitalización | es_ES |
| dc.subject | Modelado 3D | es_ES |
| dc.subject | Reconocimiento | es_ES |
| dc.title | Análisis de Datos 3D Para Generación Automática de Modelos BIM de Interiores Habitados | es_ES |
| dc.title.alternative | 3D Data Processing: Towards the Automated BIM in Inhabited Indoors | es_ES |
| dc.type | Artículo | es_ES |
| dc.identifier.doi | 10.1016/j.riai.2011.09.010 | |
| dc.relation.projectID | info:eu-repo/grantAgreement/NSF//0856558/US/Automating the Creation of As-built Building Information Models/ | es_ES |
| dc.rights.accessRights | Abierto | es_ES |
| dc.description.bibliographicCitation | Adán, A.; Huber, D. (2011). Análisis de Datos 3D Para Generación Automática de Modelos BIM de Interiores Habitados. Revista Iberoamericana de Automática e Informática industrial. 8(4):357-370. https://doi.org/10.1016/j.riai.2011.09.010 | es_ES |
| dc.description.accrualMethod | OJS | es_ES |
| dc.relation.publisherversion | https://doi.org/10.1016/j.riai.2011.09.010 | es_ES |
| dc.description.upvformatpinicio | 357 | es_ES |
| dc.description.upvformatpfin | 370 | es_ES |
| dc.type.version | info:eu-repo/semantics/publishedVersion | es_ES |
| dc.description.volume | 8 | es_ES |
| dc.description.issue | 4 | es_ES |
| dc.identifier.eissn | 1697-7920 | |
| dc.relation.pasarela | OJS\9705 | es_ES |
| dc.contributor.funder | National Science Foundation, EEUU | es_ES |
| dc.description.references | Dell’Acqua, F., & Fisher, R. (2002). Reconstruction of planar surfaces behind occlusions in range images. IEEE Transactions on Pattern Analysis and Machine Intelligence, 24(4), 569-575. doi:10.1109/34.993564 | es_ES |
| dc.description.references | Elmqvist, N., & Tsigas, P. (2008). A Taxonomy of 3D Occlusion Management for Visualization. IEEE Transactions on Visualization and Computer Graphics, 14(5), 1095-1109. doi:10.1109/tvcg.2008.59 | es_ES |
| dc.description.references | Han, F., Tu, Z., & Zhu, S.-C. (2002). A Stochastic Algorithm for 3D Scene Segmentation and Reconstruction. Lecture Notes in Computer Science, 502-516. doi:10.1007/3-540-47977-5_33 | es_ES |
| dc.description.references | Muñoz-Salinas, R., Aguirre, E., & García-Silvente, M. (2006). Detection of doors using a genetic visual fuzzy system for mobile robots. Autonomous Robots, 21(2), 123-141. doi:10.1007/s10514-006-7847-8 | es_ES |
| dc.description.references | Wang, J., & Oliveira, M. M. (2002). Improved Scene Reconstruction from Range Images. Computer Graphics Forum, 21(3), 521-530. doi:10.1111/1467-8659.00702 | es_ES |
Este ítem aparece en la(s) siguiente(s) colección(ones)

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
