


Embedded Distributed Vision System for Humanoid Soccer Robot
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Estadísticas
Ayuda RiuNet
Admin. UPV



Embedded Distributed Vision System for Humanoid Soccer Robot
Mostrar el registro sencillo del ítem
Ficheros en el ítem
| dc.contributor.author | Blanes Noguera, Francisco
|
es_ES |
| dc.contributor.author | Muñoz Benavent, Pau
|
es_ES |
| dc.contributor.author | Muñoz Alcobendas, Manuel
|
es_ES |
| dc.contributor.author | Simó Ten, José Enrique
|
es_ES |
| dc.contributor.author | Coronel Parada, Javier Osvaldo
|
es_ES |
| dc.contributor.author | Albero Gil, Miguel
|
es_ES |
| dc.date.accessioned | 2013-04-29T11:28:55Z | |
| dc.date.available | 2013-04-29T11:28:55Z | |
| dc.date.issued | 2011 | |
| dc.identifier.issn | 1888-0258 | |
| dc.identifier.uri | http://hdl.handle.net/10251/28302 | |
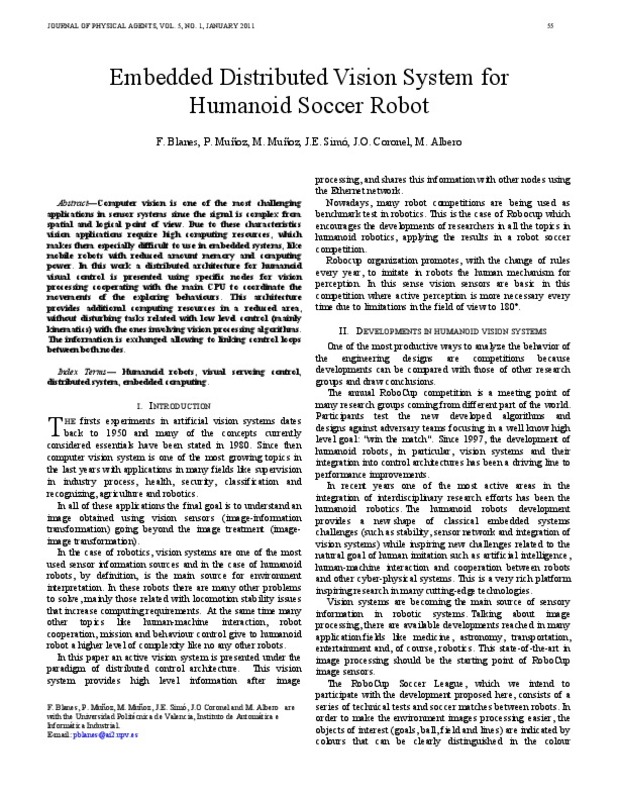
| dc.description.abstract | [EN] Computer vision is one of the most challenging applications in sensor systems since the signal is complex from spatial and logical point of view. Due to these characteristics vision applications require high computing resources, which makes them especially difficult to use in embedded systems, like mobile robots with reduced amount memory and computing power. In this work a distributed architecture for humanoid visual control is presented using specific nodes for vision processing cooperating with the main CPU to coordinate the movements of the exploring behaviours. This architecture provides additional computing resources in a reduced area, without disturbing tasks related with low level control (mainly kinematics) with the ones involving vision processing algorithms. The information is exchanged allowing to linking control loops between both nodes. | es_ES |
| dc.description.sponsorship | This work was supported from the Spanish MICINN project SIDIRELI DPI2008-06737-C02-01/02 and FEDER founds. | |
| dc.language | Inglés | es_ES |
| dc.publisher | Red de Agentes Fisicos | es_ES |
| dc.relation.ispartof | Journal of Physical Agents | es_ES |
| dc.rights | Reconocimiento - Compartir igual (by-sa) | es_ES |
| dc.subject | Distributed systems | es_ES |
| dc.subject | Embedded computing | es_ES |
| dc.subject | Humanoid robots | es_ES |
| dc.subject | Visual servoing control | es_ES |
| dc.subject.classification | ARQUITECTURA Y TECNOLOGIA DE COMPUTADORES | es_ES |
| dc.title | Embedded Distributed Vision System for Humanoid Soccer Robot | es_ES |
| dc.type | Artículo | es_ES |
| dc.identifier.doi | 10.14198/JoPha.2011.5.1.07 | |
| dc.relation.projectID | info:eu-repo/grantAgreement/MICINN//DPI2008-06737-C02-01/ES/NUCLEO DE CONTROL EN SISTEMAS DISTRIBUIDOS/ | es_ES |
| dc.rights.accessRights | Abierto | es_ES |
| dc.contributor.affiliation | Universitat Politècnica de València. Departamento de Informática de Sistemas y Computadores - Departament d'Informàtica de Sistemes i Computadors | es_ES |
| dc.contributor.affiliation | Universitat Politècnica de València. Instituto Universitario de Automática e Informática Industrial - Institut Universitari d'Automàtica i Informàtica Industrial | es_ES |
| dc.description.bibliographicCitation | Blanes Noguera, F.; Muñoz Benavent, P.; Muñoz Alcobendas, M.; Simó Ten, JE.; Coronel Parada, JO.; Albero Gil, M. (2011). Embedded Distributed Vision System for Humanoid Soccer Robot. Journal of Physical Agents. 5(1):55-62. https://doi.org/10.14198/JoPha.2011.5.1.07 | es_ES |
| dc.description.accrualMethod | S | es_ES |
| dc.relation.publisherversion | http://doi.org/10.14198/JoPha.2011.5.1.07 | es_ES |
| dc.description.upvformatpinicio | 55 | es_ES |
| dc.description.upvformatpfin | 62 | es_ES |
| dc.type.version | info:eu-repo/semantics/publishedVersion | es_ES |
| dc.description.volume | 5 | es_ES |
| dc.description.issue | 1 | es_ES |
| dc.relation.senia | 207320 | |
| dc.contributor.funder | Ministerio de Ciencia e Innovación |
Este ítem aparece en la(s) siguiente(s) colección(ones)

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
