


Listar por palabra clave "Solidworks"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por palabra clave
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por palabra clave "Solidworks"
Mostrando ítems 21-40 de 52
-
 Ivàñez Enguix, Vicent Salvador (2021-12-01)[ES] El objeto del presente trabajo es el estudio computacional, mediante CFD, del flujo interno en una tobera de inyección diésel comercial con diferentes modelos turbulentos mediante OpenFOAM y su comparación con un ...
Ivàñez Enguix, Vicent Salvador (2021-12-01)[ES] El objeto del presente trabajo es el estudio computacional, mediante CFD, del flujo interno en una tobera de inyección diésel comercial con diferentes modelos turbulentos mediante OpenFOAM y su comparación con un ... -
García López, Miguel (Universitat Politècnica de València, 2015-09-07)El objetivo de este proyecto es la utilización del código de cálculo CONVERGE de CFD para el modelado y simulación de un inyector diésel y la posterior comparación de los resultados obtenidos con los proporcionados por un ...
-
Fuster Climent, Francesc (2022-04-12)[ES] El objetivo del proyecto es la validación del código CONVERGE de CFD mediante el modelado y la simulación de un inyector diésel BOSH.
-
 Clemente Palanca, Enrique (Universitat Politècnica de València, 2022-06-13)[ES] Con este tipo de trabajo se pretende contribuir a la adquisición de competencias por parte del alumno en el uso de algunas de las herramientas de diseño computacional en ingeniera mecánica que se utilizan en el ámbito ...
Clemente Palanca, Enrique (Universitat Politècnica de València, 2022-06-13)[ES] Con este tipo de trabajo se pretende contribuir a la adquisición de competencias por parte del alumno en el uso de algunas de las herramientas de diseño computacional en ingeniera mecánica que se utilizan en el ámbito ... -
 Domínguez Navarro, Fernando (Universitat Politècnica de València, 2018-09-24)[ES] Con este tipo de trabajo se pretende contribuir a la adquisición de competencias por parte del alumno en el uso de algunas de las herramientas de diseño computacional en ingeniera mecánica que se utilizan en el ámbito ...
Domínguez Navarro, Fernando (Universitat Politècnica de València, 2018-09-24)[ES] Con este tipo de trabajo se pretende contribuir a la adquisición de competencias por parte del alumno en el uso de algunas de las herramientas de diseño computacional en ingeniera mecánica que se utilizan en el ámbito ... -
 Sales Lairón, Salvador José (Universitat Politècnica de València, 2016-12-29)Con este tipo de trabajo se pretende contribuir a la adquisición de competencias por parte del alumno en el uso de algunas de las herramientas de diseño computacional en ingeniera mecánica que se utilizan en el ámbito ...
Sales Lairón, Salvador José (Universitat Politècnica de València, 2016-12-29)Con este tipo de trabajo se pretende contribuir a la adquisición de competencias por parte del alumno en el uso de algunas de las herramientas de diseño computacional en ingeniera mecánica que se utilizan en el ámbito ... -
 Fernández Ortola, Antonio José (Universitat Politècnica de València, 2017-02-20)[ES] Con este tipo de trabajo se pretende contribuir a la adquisición de competencias por parte del alumno en el uso de algunas de las herramientas de diseño computacional en ingeniera mecánica que se utilizan en el ámbito ...
Fernández Ortola, Antonio José (Universitat Politècnica de València, 2017-02-20)[ES] Con este tipo de trabajo se pretende contribuir a la adquisición de competencias por parte del alumno en el uso de algunas de las herramientas de diseño computacional en ingeniera mecánica que se utilizan en el ámbito ... -
Guerini, Leila Catarina (Universitat Politècnica de València, 2018-11-02)[ES] Se trata de modelizar una grúa para manipulación de vehículos automóviles con una capacidad de carga intermedia con el fin de analizar las prestaciones de la misma, particularmente su espacio de trabajo, cargas máximas ...
-
Castellese Monzó, Mateo (Universitat Politècnica de València, 2015-01-09)El principal objetivo de este proyecto es la modelización y análisis del brazo de una máquina excavadora hidráulica y así conseguir la mejora en el diseño de las piezas que componen el mecanismo. Para ello se modelizarán ...
-
García Pérez, Adrián (Universitat Politècnica de València, 2015-07-22)Este Trabajo Fin de Grado consiste en la modelización del Porsche 911 Carrera S, uno de los modelos del mítico Porsche 911, que durante los años se ha fabricado siguiendo un estilo único que lo hace uno de los coches más ...
-
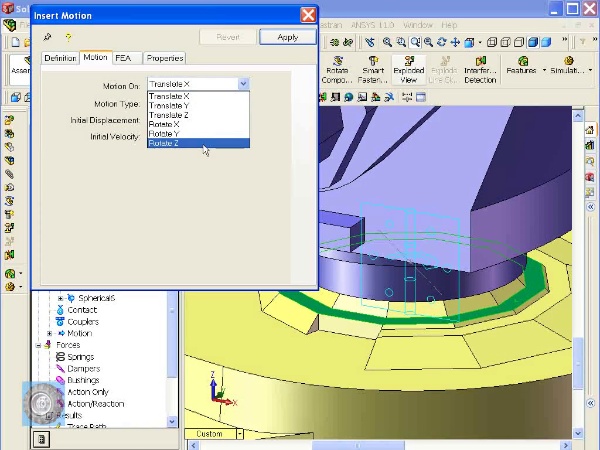 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 10 DE 10 - DEFINICION DEL MOVIMIENTO EN LOS GRADOS DE LIBERTAD DEL MODELO CINEMATICO - En este tramo vamos a definir un movimiento coherente en todos los grados de libertad del modelo cinemático en CM. Comenzamos por ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 10 DE 10 - DEFINICION DEL MOVIMIENTO EN LOS GRADOS DE LIBERTAD DEL MODELO CINEMATICO - En este tramo vamos a definir un movimiento coherente en todos los grados de libertad del modelo cinemático en CM. Comenzamos por ... -
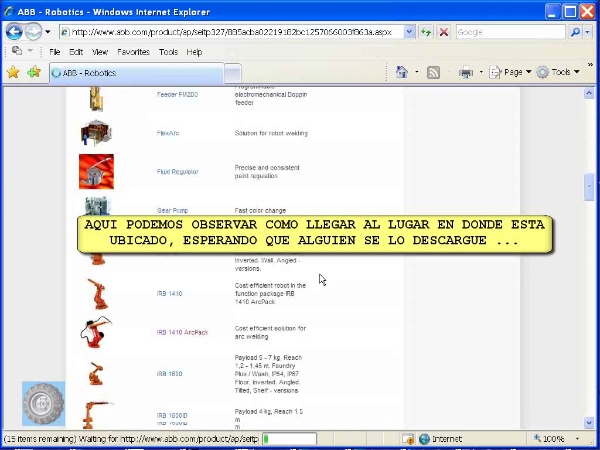 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 01 DE 10 - IDENTIFICACION DE PIEZAS FUNDAMENTALES - Partiendo de un modelo geométrico de robot ABB, directamente seleccionado y descargado de la página web del ABB, este y los videos que le siguen, tiene como objetivo ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 01 DE 10 - IDENTIFICACION DE PIEZAS FUNDAMENTALES - Partiendo de un modelo geométrico de robot ABB, directamente seleccionado y descargado de la página web del ABB, este y los videos que le siguen, tiene como objetivo ... -
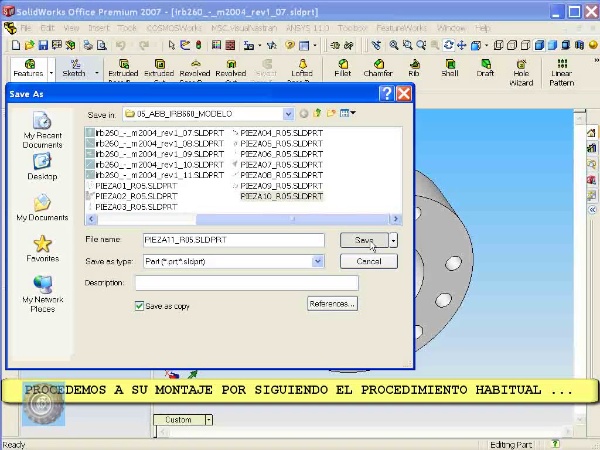
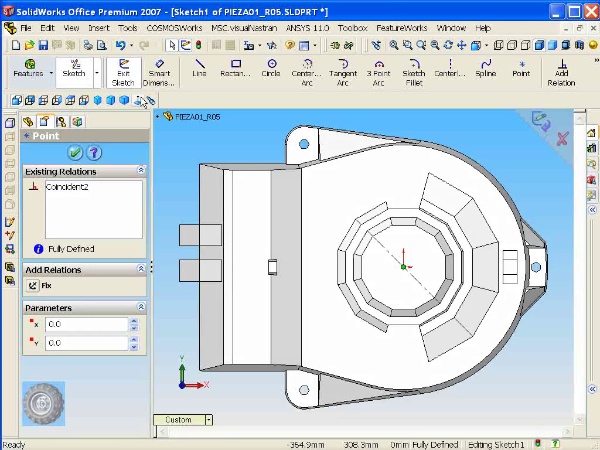 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 02 DE 10 - DEFINICION MODELO CINEMATICO EN SW (1) - En primer lugar, se procede a crear un nuevo fichero de ensamblaje en Solidworks. Insertando en él la primera de las piezas creadas, ¿PIEZA_01.SLDPRT¿, que contiene ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 02 DE 10 - DEFINICION MODELO CINEMATICO EN SW (1) - En primer lugar, se procede a crear un nuevo fichero de ensamblaje en Solidworks. Insertando en él la primera de las piezas creadas, ¿PIEZA_01.SLDPRT¿, que contiene ... -
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 03 DE 10 - DEFINICION MODELO CINEMATICO EN SW (2) - Continua el proceso de montaje, insertando en el ensamblaje la cuarta de las piezas creadas, ¿PIEZA_04.SLDPRT¿, que es el brazo secundario del robot. Observar que ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 03 DE 10 - DEFINICION MODELO CINEMATICO EN SW (2) - Continua el proceso de montaje, insertando en el ensamblaje la cuarta de las piezas creadas, ¿PIEZA_04.SLDPRT¿, que es el brazo secundario del robot. Observar que ... -
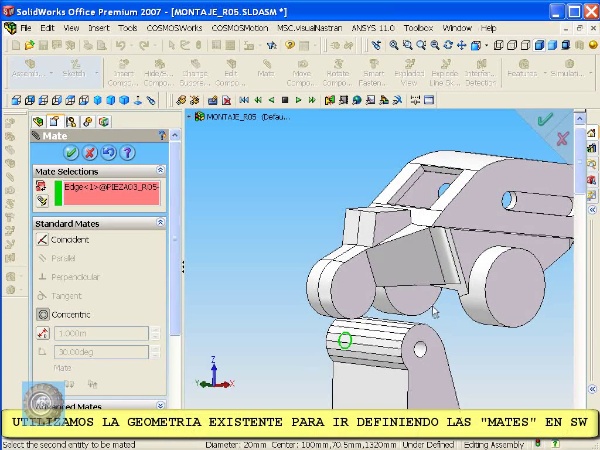
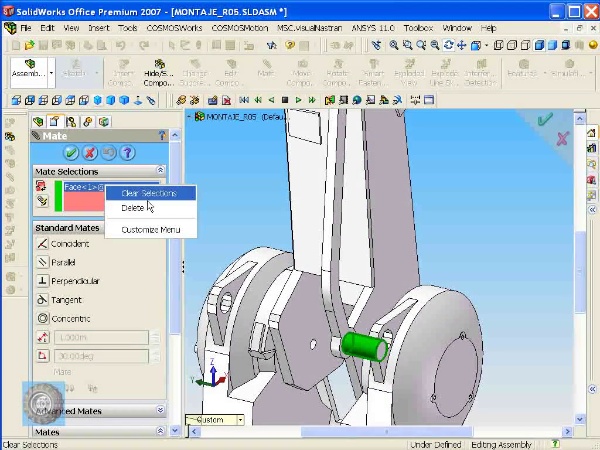 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO O4 DE 10 - DEFINICION MODELO CINEMATICO EN SW (3) - Se seleccionar las entidades geométricas más adecuadas para definir la relación de movimiento relativo o ¿mate¿ necesaria para conectar la pieza ¿PIEZA_06.SLDPRT¿ ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO O4 DE 10 - DEFINICION MODELO CINEMATICO EN SW (3) - Se seleccionar las entidades geométricas más adecuadas para definir la relación de movimiento relativo o ¿mate¿ necesaria para conectar la pieza ¿PIEZA_06.SLDPRT¿ ... -
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 05 DE 10 - DEFINICION DEL MODELO CINEMATICO EN SW (y 4) - En este tramo, en primer lugar se comprueban los movimientos relativos que poseen las distintas piezas montadas hasta el momento. Para ello se actúa sobre el ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 05 DE 10 - DEFINICION DEL MODELO CINEMATICO EN SW (y 4) - En este tramo, en primer lugar se comprueban los movimientos relativos que poseen las distintas piezas montadas hasta el momento. Para ello se actúa sobre el ... -
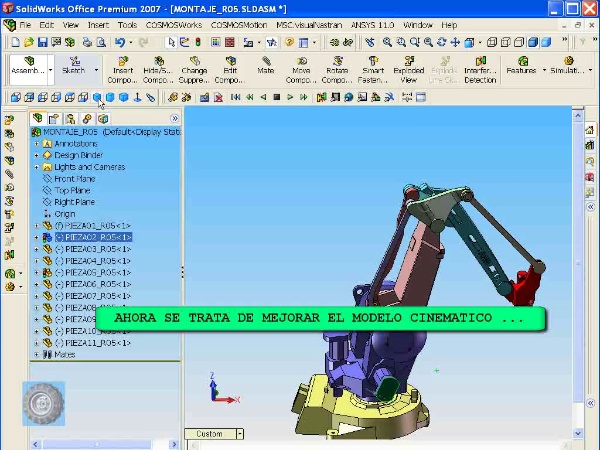 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 06 DE 10 - DEFINICION DEL MODELO CINEMATICO EN COSMOS MOTION (1) - Recordemos que en el modelo original descargado de la web de ABB sus piezas no estaban conectadas. En cambio en el modelo cinemático definido en SW ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 06 DE 10 - DEFINICION DEL MODELO CINEMATICO EN COSMOS MOTION (1) - Recordemos que en el modelo original descargado de la web de ABB sus piezas no estaban conectadas. En cambio en el modelo cinemático definido en SW ... -
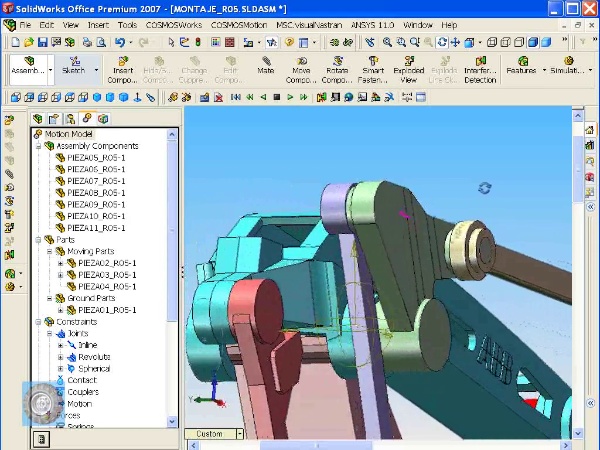 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 07 DE 10 - DEFINICION DEL MODELO CINEMATICO EN COSMOS MOTION (2) - En este tramo seguimos insertando piezas en el modelo cinemático en CM, comprobando a menudo la movilidad, definiendo los pares cinemáticos en todos ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 07 DE 10 - DEFINICION DEL MODELO CINEMATICO EN COSMOS MOTION (2) - En este tramo seguimos insertando piezas en el modelo cinemático en CM, comprobando a menudo la movilidad, definiendo los pares cinemáticos en todos ... -
 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 08 DE 10 - DEFINICION DEL MODELO CINEMATICO EN COSMOS MOTION (3) - En este tramo seguimos insertando piezas en el modelo cinemático en CM. Cada vez que insertamos una nueva pieza el número de grados de libertad del ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 08 DE 10 - DEFINICION DEL MODELO CINEMATICO EN COSMOS MOTION (3) - En este tramo seguimos insertando piezas en el modelo cinemático en CM. Cada vez que insertamos una nueva pieza el número de grados de libertad del ... -
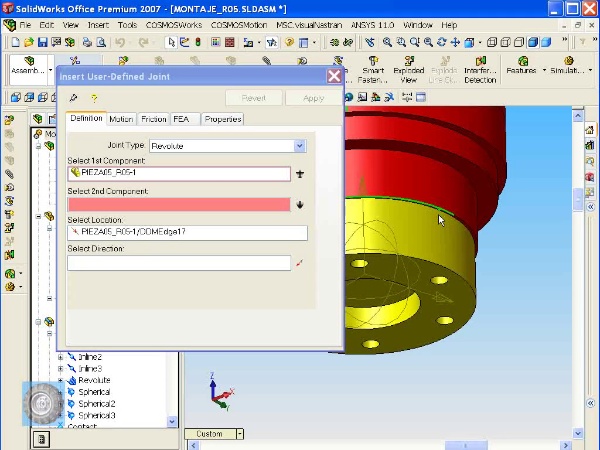
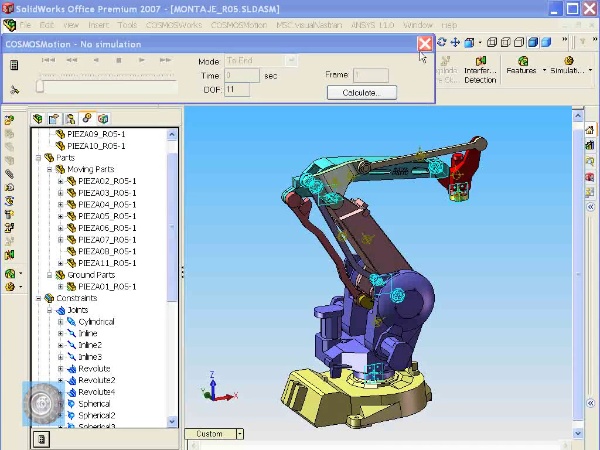 Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 09 DE 10 - DEFINICION DEL MODELO CINEMATICO EN COSMOS MOTION (y 4) - En este tramo insertamos en el modelo cinemático en CM las tres últimas piezas del robot. Definimos pares giratorios como primera opción, en los ...
Oliver Herrero, José Luís (Universitat Politècnica de València, 2008-04-14)TRAMO 09 DE 10 - DEFINICION DEL MODELO CINEMATICO EN COSMOS MOTION (y 4) - En este tramo insertamos en el modelo cinemático en CM las tres últimas piezas del robot. Definimos pares giratorios como primera opción, en los ...
Mostrando ítems 21-40 de 52

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
