


Listar por autor "Solanes Galbis, Juan Ernesto"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por autor
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por autor "Solanes Galbis, Juan Ernesto"
Mostrando ítems 1-20 de 89
-
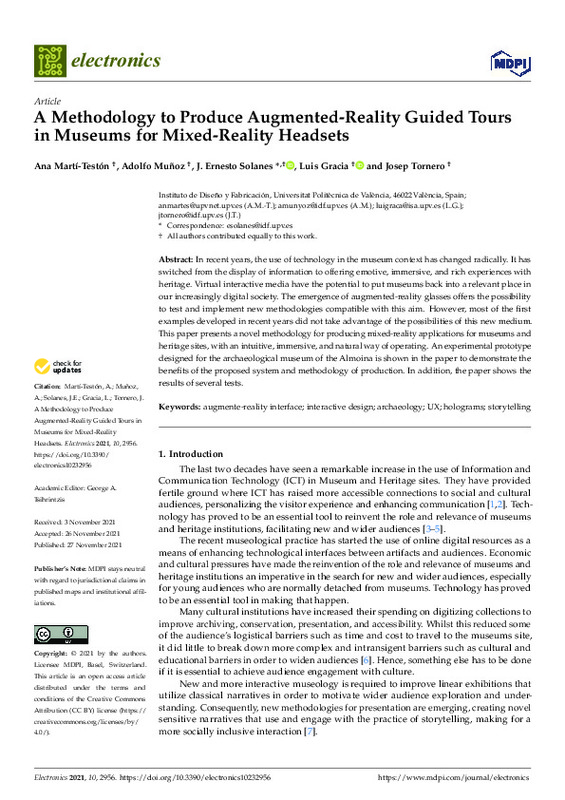 Martí-Testón, Ana; Muñoz García, Adolfo; Solanes Galbis, Juan Ernesto; Gracia Calandin, Luis Ignacio; Tornero Montserrat, Josep (MDPI AG, 2021-12)[EN] In recent years, the use of technology in the museum context has changed radically. It has switched from the display of information to offering emotive, immersive, and rich experiences with heritage. Virtual interactive ...
Martí-Testón, Ana; Muñoz García, Adolfo; Solanes Galbis, Juan Ernesto; Gracia Calandin, Luis Ignacio; Tornero Montserrat, Josep (MDPI AG, 2021-12)[EN] In recent years, the use of technology in the museum context has changed radically. It has switched from the display of information to offering emotive, immersive, and rich experiences with heritage. Virtual interactive ... -
 Solanes Galbis, Juan Ernesto; Gracia Calandin, Luis Ignacio; Muñoz-Benavent, Pau; Esparza Peidro, Alicia; Valls Miro, Jaime; Tornero Montserrat, Josep (Elsevier, 2018-12)[EN] This work presents a hybrid position/force control of robots for surface contact conditioning tasks such as polishing, profiling, deburring, etc. The robot force control is designed using sliding mode ideas to benefit ...
Solanes Galbis, Juan Ernesto; Gracia Calandin, Luis Ignacio; Muñoz-Benavent, Pau; Esparza Peidro, Alicia; Valls Miro, Jaime; Tornero Montserrat, Josep (Elsevier, 2018-12)[EN] This work presents a hybrid position/force control of robots for surface contact conditioning tasks such as polishing, profiling, deburring, etc. The robot force control is designed using sliding mode ideas to benefit ... -
 Gracia Calandin, Luis Ignacio; Solanes Galbis, Juan Ernesto; Muñoz-Benavent, Pau; Valls Miro, Jaime; Perez-Vidal, Carlos; Tornero Montserrat, Josep (Elsevier, 2018-06)[EN] This work presents a hybrid position-force control of robots in order to apply surface treatments such as polishing, grinding, finishing, deburring, etc. The robot force control is designed using sliding mode concepts ...
Gracia Calandin, Luis Ignacio; Solanes Galbis, Juan Ernesto; Muñoz-Benavent, Pau; Valls Miro, Jaime; Perez-Vidal, Carlos; Tornero Montserrat, Josep (Elsevier, 2018-06)[EN] This work presents a hybrid position-force control of robots in order to apply surface treatments such as polishing, grinding, finishing, deburring, etc. The robot force control is designed using sliding mode concepts ... -
 Muñoz Benavent, Pau; Armesto Ángel, Leopoldo; Girbés Juan, Vicent; Solanes Galbis, Juan Ernesto; Dols Ruiz, Juan Francisco; Muñoz, Adolfo; Tornero Montserrat, Josep (Chinese Institute of Automation Engineers, 2012)This paper describes the automation of a Neighborhood Electric Vehicle (NEV) and the embedded distributed architecture for implementing an Advanced Driving Assistance System (ADAS) with haptic, visual, and audio feedback ...
Muñoz Benavent, Pau; Armesto Ángel, Leopoldo; Girbés Juan, Vicent; Solanes Galbis, Juan Ernesto; Dols Ruiz, Juan Francisco; Muñoz, Adolfo; Tornero Montserrat, Josep (Chinese Institute of Automation Engineers, 2012)This paper describes the automation of a Neighborhood Electric Vehicle (NEV) and the embedded distributed architecture for implementing an Advanced Driving Assistance System (ADAS) with haptic, visual, and audio feedback ... -
 González, Claudia; Solanes Galbis, Juan Ernesto; Muñoz García, Adolfo; Gracia Calandin, Luis Ignacio; Girbés-Juan, Vicent; Tornero Montserrat, Josep (Elsevier, 2021-04)[EN] There are some industrial tasks that are still mainly performed manually by human workers due to their complexity, which is the case of surface treatment operations (such as sanding, deburring, finishing, grinding, ...
González, Claudia; Solanes Galbis, Juan Ernesto; Muñoz García, Adolfo; Gracia Calandin, Luis Ignacio; Girbés-Juan, Vicent; Tornero Montserrat, Josep (Elsevier, 2021-04)[EN] There are some industrial tasks that are still mainly performed manually by human workers due to their complexity, which is the case of surface treatment operations (such as sanding, deburring, finishing, grinding, ... -
 Zanon Heddings, Florencio Jonatan (Universitat Politècnica de València, 2018-02-01)Consulta en la Biblioteca ETSI Industriales (Riunet)
Zanon Heddings, Florencio Jonatan (Universitat Politècnica de València, 2018-02-01)Consulta en la Biblioteca ETSI Industriales (Riunet) -
 Fabra, Lidia; Solanes, J. Ernesto; Muñoz García, Adolfo; Martí Testón, Ana; Alabau, Alba; Gracia Calandin, Luis Ignacio (MDPI AG, 2024-03)[EN] This study explores the utilization of Neural Radiance Fields (NeRFs), with a specific focus on the Instant NeRFs technique. The objective is to represent three-dimensional (3D) models within the context of the ...
Fabra, Lidia; Solanes, J. Ernesto; Muñoz García, Adolfo; Martí Testón, Ana; Alabau, Alba; Gracia Calandin, Luis Ignacio (MDPI AG, 2024-03)[EN] This study explores the utilization of Neural Radiance Fields (NeRFs), with a specific focus on the Instant NeRFs technique. The objective is to represent three-dimensional (3D) models within the context of the ... -
 García-Fernández, Alberto; Solanes, J. Ernesto; Muñoz García, Adolfo; Gracia Calandin, Luis Ignacio; Tornero Montserrat, Josep (MDPI AG, 2022-05)[EN] Teleoperation of bimanual robots is being used to carry out complex tasks such as surgeries in medicine. Despite the technological advances, current interfaces are not natural to the users, who spend long periods of ...
García-Fernández, Alberto; Solanes, J. Ernesto; Muñoz García, Adolfo; Gracia Calandin, Luis Ignacio; Tornero Montserrat, Josep (MDPI AG, 2022-05)[EN] Teleoperation of bimanual robots is being used to carry out complex tasks such as surgeries in medicine. Despite the technological advances, current interfaces are not natural to the users, who spend long periods of ... -
Paredes Mateo, Sorángel Elena (Universitat Politècnica de València, 2023-10-26)[ES] En el presente Trabajo de Fin de Grado (TFG) se tiene como objetivo realizar la automatización de los procesos de producción y almacenaje de material de construcción. La línea de producción pasa por diferentes etapas ...
-
 Satorres Mira, Salvador (Universitat Politècnica de València, 2021-06-16)[ES] En este proyecto se procederá a la realización de la automatización de un paletizador, este proceso estará controlado mediante el autómata de SIEMENS S7-1200. La programación de este autómata se realizará con el ...
Satorres Mira, Salvador (Universitat Politècnica de València, 2021-06-16)[ES] En este proyecto se procederá a la realización de la automatización de un paletizador, este proceso estará controlado mediante el autómata de SIEMENS S7-1200. La programación de este autómata se realizará con el ... -
Ruiz Vilches, Rubén (Universitat Politècnica de València, 2023-10-06)[ES] El presente Trabajo de Fin de Grado (TFG) tiene como objetivo automatizar el paletizado de cajas de patatas fritas de una línea de producción, proceso que en la actualidad se realiza de forma manual. La solución ...
-
Mira Pina, Álvaro José (Universitat Politècnica de València, 2022-07-18)[ES] El presente TFG tiene como objetivo desarrollar, calcular y diseñar una automatización mediante un robot de corte por plasma que sustituya el trabajo que se realiza actualmente en una máquina fresadora en CNC. El ...
-
 Palao Doménech, Cristian (Universitat Politècnica de València, 2023-12-21)[ES] El objetivo de este proyecto es realizar la automatización del proceso de estiraje de perfiles de aluminio utilizados en la línea de producción de extrusión de aluminio con un nuevo sistema automatizado para la ...
Palao Doménech, Cristian (Universitat Politècnica de València, 2023-12-21)[ES] El objetivo de este proyecto es realizar la automatización del proceso de estiraje de perfiles de aluminio utilizados en la línea de producción de extrusión de aluminio con un nuevo sistema automatizado para la ... -
 Solanes, J. Ernesto; Graciá, Luis (Editorial Universitat Politècnica de València, 2021-02-08)[ES] Es bien sabido que las modalidades pedagógicas que fomentan que el alumno sea protagonista de su proceso de aprendizaje son más eficaces. Sin embargo, el arraigo hacia la modalidad de clase magistral hace que tanto ...
Solanes, J. Ernesto; Graciá, Luis (Editorial Universitat Politècnica de València, 2021-02-08)[ES] Es bien sabido que las modalidades pedagógicas que fomentan que el alumno sea protagonista de su proceso de aprendizaje son más eficaces. Sin embargo, el arraigo hacia la modalidad de clase magistral hace que tanto ... -
 García-Fernández, Alberto; Solanes, J. Ernesto; Gracia Calandin, Luis Ignacio; Muñoz-Benavent, Pau; Girbés-Juan, Vicent; Tornero, Josep (Taylor & Francis, 2022-01-02)[EN] This work develops a method to perform surface treatment tasks using a bimanual robotic system, i.e. two robot arms cooperatively performing the task. In particular, one robot arm holds the work-piece while the other ...
García-Fernández, Alberto; Solanes, J. Ernesto; Gracia Calandin, Luis Ignacio; Muñoz-Benavent, Pau; Girbés-Juan, Vicent; Tornero, Josep (Taylor & Francis, 2022-01-02)[EN] This work develops a method to perform surface treatment tasks using a bimanual robotic system, i.e. two robot arms cooperatively performing the task. In particular, one robot arm holds the work-piece while the other ... -
 Muñoz García, Adolfo; Martí Testón, Ana; Mahiques, Xavier; Gracia Calandin, Luis Ignacio; Solanes Galbis, Juan Ernesto; Tornero Montserrat, Josep (Elsevier, 2020-01)[EN] This research develops a new mixed reality-based worker interface for industrial camera 3D positioning, which is intuitive and easy to manage, in order to enhance the worker safety, ergonomics and productivity. An ...
Muñoz García, Adolfo; Martí Testón, Ana; Mahiques, Xavier; Gracia Calandin, Luis Ignacio; Solanes Galbis, Juan Ernesto; Tornero Montserrat, Josep (Elsevier, 2020-01)[EN] This research develops a new mixed reality-based worker interface for industrial camera 3D positioning, which is intuitive and easy to manage, in order to enhance the worker safety, ergonomics and productivity. An ... -
 Girbés-Juan, Vicent; Schettino, Vinicius; Gracia Calandin, Luis Ignacio; Solanes, J. Ernesto; Demiris, Yiannis; Tornero, Josep (Springer-Verlag, 2022-06)[EN] High dexterity is required in tasks in which there is contact between objects, such as surface conditioning (wiping, polishing, scuffing, sanding, etc.), specially when the location of the objects involved is unknown ...
Girbés-Juan, Vicent; Schettino, Vinicius; Gracia Calandin, Luis Ignacio; Solanes, J. Ernesto; Demiris, Yiannis; Tornero, Josep (Springer-Verlag, 2022-06)[EN] High dexterity is required in tasks in which there is contact between objects, such as surface conditioning (wiping, polishing, scuffing, sanding, etc.), specially when the location of the objects involved is unknown ... -
 Solanes Galbis, Juan Ernesto (2023-02-01)En este objeto de aprendizaje el alumno podrá aprender como obtener las expresiones de frecuencia máxima y fase máxima características de los compensadores en adelanto establecidas en los libros de ingeniería de control.
Solanes Galbis, Juan Ernesto (2023-02-01)En este objeto de aprendizaje el alumno podrá aprender como obtener las expresiones de frecuencia máxima y fase máxima características de los compensadores en adelanto establecidas en los libros de ingeniería de control. -
 Solanes Galbis, Juan Ernesto (Universitat Politècnica de València, 2022-04-26)En este video el alumno podrá aprender a establecer una comunicación entre PLCSim y Factory IO a través de un servidor OPC utilizando el software intermediario NettoPLCSim.
Solanes Galbis, Juan Ernesto (Universitat Politècnica de València, 2022-04-26)En este video el alumno podrá aprender a establecer una comunicación entre PLCSim y Factory IO a través de un servidor OPC utilizando el software intermediario NettoPLCSim. -
 Solanes Galbis, Juan Ernesto (2023-02-01)En este vídeo el alumno será capaz de aprender la forma de configurar el servidor OPC UA para permitir el acceso remoto de varios clientes.
Solanes Galbis, Juan Ernesto (2023-02-01)En este vídeo el alumno será capaz de aprender la forma de configurar el servidor OPC UA para permitir el acceso remoto de varios clientes.
Mostrando ítems 1-20 de 89

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
