


Listar por palabra clave "Cinemática"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por palabra clave
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por palabra clave "Cinemática"
Mostrando ítems 21-40 de 64
-
 López Jiménez, Petra Amparo (Universitat Politècnica de València, 2014-07-07)La cinemática de fluidos representa el movimiento de los mismos en lo que denominamos un flujo, que analiza la velocidad y aceleración que adopta el fluido en movimiento. El presente objeto de aprendizaje presenta los ...
López Jiménez, Petra Amparo (Universitat Politècnica de València, 2014-07-07)La cinemática de fluidos representa el movimiento de los mismos en lo que denominamos un flujo, que analiza la velocidad y aceleración que adopta el fluido en movimiento. El presente objeto de aprendizaje presenta los ... -
 De Rosario Martínez, Helios (Universitat Politècnica de València, 2020-04-21)[EN] This PhD Thesis presents a research on trunk kinematics in seated posture, applied to defining a biomechanical model of the flexion-extension movement, and exploring the relationship between the trunk movement and ...
De Rosario Martínez, Helios (Universitat Politècnica de València, 2020-04-21)[EN] This PhD Thesis presents a research on trunk kinematics in seated posture, applied to defining a biomechanical model of the flexion-extension movement, and exploring the relationship between the trunk movement and ... -
 Pérez Sánchez, Modesto; López Jiménez, Petra Amparo (2022-11-28)El objeto de aprendizaje introduce los conceptos generales de la cinemática de los fluidos que sirven como base para una estudio en profundidad de la misma
Pérez Sánchez, Modesto; López Jiménez, Petra Amparo (2022-11-28)El objeto de aprendizaje introduce los conceptos generales de la cinemática de los fluidos que sirven como base para una estudio en profundidad de la misma -
 Baydal Bertomeu, José Mª (Universitat Politècnica de València, 2013-01-09)El síndrome del latigazo cervical (SLC), es una de las lesiones que se produce con mayor frecuencia. Esta situación supone un grave problema socio-económico, y que representa la intervención de diversos estamentos como el ...
Baydal Bertomeu, José Mª (Universitat Politècnica de València, 2013-01-09)El síndrome del latigazo cervical (SLC), es una de las lesiones que se produce con mayor frecuencia. Esta situación supone un grave problema socio-económico, y que representa la intervención de diversos estamentos como el ... -
 Meseguer Dueñas, José María (Universitat Politècnica de València, 2016-05-04)Ejercicio de cinemática con la resolución y el análisis del resultado mediante hoja de cálculo, estudiando el efecto de los distintos parámetros sobre la solución.
Meseguer Dueñas, José María (Universitat Politècnica de València, 2016-05-04)Ejercicio de cinemática con la resolución y el análisis del resultado mediante hoja de cálculo, estudiando el efecto de los distintos parámetros sobre la solución. -
 Basset Salom, Luisa (Universitat Politècnica de València, 2011-11-08)En este artículo se clasificará cinemáticamente las estructuras en función de su grado de indeterminación cinemática, partiendo de la definición de éste y de su determinación
Basset Salom, Luisa (Universitat Politècnica de València, 2011-11-08)En este artículo se clasificará cinemáticamente las estructuras en función de su grado de indeterminación cinemática, partiendo de la definición de éste y de su determinación -
 Vidal Solano, Luis (Universitat Politècnica de València, 2022-12-01)[ES] El sistema VEMOTION, desarrollado por Reactive Robotics GmbH, consiste en un sistema robótico de rehabilitación de pacientes con problemas de movilidad. El objetivo principal de este estudio es capturar los datos de ...
Vidal Solano, Luis (Universitat Politècnica de València, 2022-12-01)[ES] El sistema VEMOTION, desarrollado por Reactive Robotics GmbH, consiste en un sistema robótico de rehabilitación de pacientes con problemas de movilidad. El objetivo principal de este estudio es capturar los datos de ... -
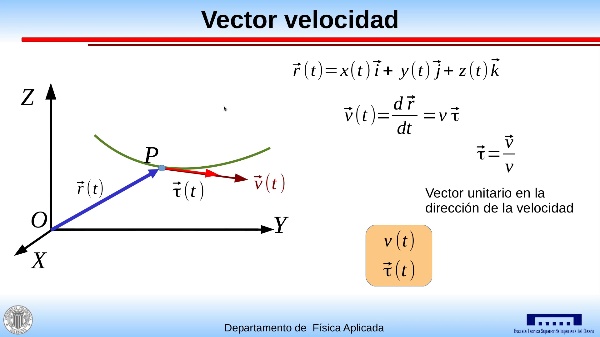 Gómez Tejedor, José Antonio; Riera Guasp, Jaime; Ardid Ramírez, Miguel (Universitat Politècnica de València, 2016-06-27)En este Screencast se explica el significado de las componentes intrínsecas de la aceleración: componente normal y tangencial. También se muestra la deducción matemática de dichas componentes.
Gómez Tejedor, José Antonio; Riera Guasp, Jaime; Ardid Ramírez, Miguel (Universitat Politècnica de València, 2016-06-27)En este Screencast se explica el significado de las componentes intrínsecas de la aceleración: componente normal y tangencial. También se muestra la deducción matemática de dichas componentes. -
 Babiera Sancho, Carlos (Universitat Politècnica de València, 2016-09-12)[ES] En el presente proyecto se muestra el diseño de una aplicación programada en LabVIEW, con la cual se controla la posición del brazo robot S300105 de 5 ejes y 4 articulaciones desarrollado por Lynxmotion, Inc. Esta ...
Babiera Sancho, Carlos (Universitat Politècnica de València, 2016-09-12)[ES] En el presente proyecto se muestra el diseño de una aplicación programada en LabVIEW, con la cual se controla la posición del brazo robot S300105 de 5 ejes y 4 articulaciones desarrollado por Lynxmotion, Inc. Esta ... -
 Torregrosa Antón, Álvaro (Universitat Politècnica de València, 2019-10-16)[ES] Este Trabajo Fin de Master pretende mostrar un acercamiento al diseño de robots paralelos, en concreto al desarrollo de su cinemática. Para ello se hará uso de la Teoría de Tornillos, profundizando en sus bases teóricas ...
Torregrosa Antón, Álvaro (Universitat Politècnica de València, 2019-10-16)[ES] Este Trabajo Fin de Master pretende mostrar un acercamiento al diseño de robots paralelos, en concreto al desarrollo de su cinemática. Para ello se hará uso de la Teoría de Tornillos, profundizando en sus bases teóricas ... -
 Oliver Peiró, Guillermo (Universitat Politècnica de València, 2018-10-15)[ES] Un modelo bidimensional simplificado del robot Handle de Boston Dynamics será desarrollado utilizando herramientas computacionales de amplia aplicación en la industria. Como punto de partida, se ensamblará un ...
Oliver Peiró, Guillermo (Universitat Politècnica de València, 2018-10-15)[ES] Un modelo bidimensional simplificado del robot Handle de Boston Dynamics será desarrollado utilizando herramientas computacionales de amplia aplicación en la industria. Como punto de partida, se ensamblará un ... -
 Hernández Poveda, Javier (Universitat Politècnica de València, 2020-01-09)[ES] El objetivo de este proyecto es el de estudiar el comportamiento cinemático y dinámico de un sistema mecánico multiplicador de un conjunto de aerogeneradores. Dichos aerogeneradores están encargados de suministrar ...
Hernández Poveda, Javier (Universitat Politècnica de València, 2020-01-09)[ES] El objetivo de este proyecto es el de estudiar el comportamiento cinemático y dinámico de un sistema mecánico multiplicador de un conjunto de aerogeneradores. Dichos aerogeneradores están encargados de suministrar ... -
Cabo Massó, Joaquim (Universitat Politècnica de València, 2020-09-18)[ES] Se pretende diseñar el grupo diferencial de un vehiculo todoterreno con el motor dispuesto en la parte delantera y de tracción trasera. El diferencial es el mecanismo que permite que las ruedas de un ...
-
 Escobar Samaniego, Jean Kevin (Universitat Politècnica de València, 2021-09-24)[ES] En esta memoria se expone mi trabajo de diseño, modelado digital 3D y desarrollo de un personaje propio con características técnicas adecuadas para su implementación en videojuegos AAA según los estándares actuales. Para ...
Escobar Samaniego, Jean Kevin (Universitat Politècnica de València, 2021-09-24)[ES] En esta memoria se expone mi trabajo de diseño, modelado digital 3D y desarrollo de un personaje propio con características técnicas adecuadas para su implementación en videojuegos AAA según los estándares actuales. Para ... -
 Ferrando Santamaría, Vicente (Universitat Politècnica de València, 2020-10-27)[ES] El objetivo de este TFG es proporcionar a alumnos de cualquier titulación/asignatura relacionada con la robótica los planos, el diseño y el código de un brazo robótico con 3 grados de libertad para que puedan crear ...
Ferrando Santamaría, Vicente (Universitat Politècnica de València, 2020-10-27)[ES] El objetivo de este TFG es proporcionar a alumnos de cualquier titulación/asignatura relacionada con la robótica los planos, el diseño y el código de un brazo robótico con 3 grados de libertad para que puedan crear ... -
 Duarte Mendoza, Juan Fernando (Universitat Politècnica de València, 2019-10-21)[ES] Los trabajos lineales en la industria del automóvil involucran riesgos derivados de tareas repetidas y posturas forzadas mantenidas en el tiempo. Si bien, varias son las plataformas y herramientas que intentan evaluar ...
Duarte Mendoza, Juan Fernando (Universitat Politècnica de València, 2019-10-21)[ES] Los trabajos lineales en la industria del automóvil involucran riesgos derivados de tareas repetidas y posturas forzadas mantenidas en el tiempo. Si bien, varias son las plataformas y herramientas que intentan evaluar ... -
Ramírez Bas, Ignacio (Universitat Politècnica de València, 2019-09-30)[ES] El objeto de este proyecto es el estudio del modelo cinemático directo de un Robot antropomórfico de seis grados de libertad, de modelo ABB IRB 1200-7. Este estudio se basará en la comparación del modelo matemático ...
-
Rua Tirado, Sara (Universitat Politècnica de València, 2024-06-12)[ES] Los robots móviles en la industria suelen ser vulnerables al cambio de los parámetros cinemáticos, debido a, por ejemplo, desgaste de las ruedas, golpes, etc. De vez en cuando, es aconsejable recalibrar estos parámetros. ...
-
 López Jiménez, Petra Amparo (Universitat Politècnica de València, 2014-07-07)La cinemática de fluidos representa a los fluidos en movimiento, de manera que hay que analizar los aspectos de velocidad de dichos movimientos. Se plantea en este objeto de aprendizaje la clasificación de los flujos con ...
López Jiménez, Petra Amparo (Universitat Politècnica de València, 2014-07-07)La cinemática de fluidos representa a los fluidos en movimiento, de manera que hay que analizar los aspectos de velocidad de dichos movimientos. Se plantea en este objeto de aprendizaje la clasificación de los flujos con ... -
 Gomis Hilario, Oscar (Universitat Politècnica de València, 2008-04-14)Introducción al movimiento armónico simple (M.A.S.) explicando qué es un M.A.S. y definiendo las ecuaciones de posición, velodidad y aceleración del M.A.S.
Gomis Hilario, Oscar (Universitat Politècnica de València, 2008-04-14)Introducción al movimiento armónico simple (M.A.S.) explicando qué es un M.A.S. y definiendo las ecuaciones de posición, velodidad y aceleración del M.A.S.
Mostrando ítems 21-40 de 64

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
