


Listar por palabra clave "Sistemas robotizados"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por palabra clave
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por palabra clave "Sistemas robotizados"
Mostrando ítems 1-13 de 13
-
 Valera Fernández, Ángel; Juste López, Daniel; Sánchez Salmerón, Antonio José; Ricolfe Viala, Carlos; Mellado Arteche, Martín; Olmos Zaragozá, Eduardo (Elsevier España (Elsevier Doyma), 2012-03)[EN] La integración de equipamiento y dispositivos en células robotizadas industriales con tecnologías de interfaz de Ethernet y dispositivos de bajo coste como sistemas de visión, cámaras láser, sensores de fuerza, autómatas ...
Valera Fernández, Ángel; Juste López, Daniel; Sánchez Salmerón, Antonio José; Ricolfe Viala, Carlos; Mellado Arteche, Martín; Olmos Zaragozá, Eduardo (Elsevier España (Elsevier Doyma), 2012-03)[EN] La integración de equipamiento y dispositivos en células robotizadas industriales con tecnologías de interfaz de Ethernet y dispositivos de bajo coste como sistemas de visión, cámaras láser, sensores de fuerza, autómatas ... -
 Gallardo-Alvarado, J.; Tinajero-Campo, J. H.; Sánchez-Rodríguez, Á. (Universitat Politècnica de València, 2020-12-23)[EN] This paper addresses the kinematic analysis of a redundant parallel manipulator with a configurable platform equipped with two end-effectors. The closure equations of the position analysis generate a system of quadratic ...
Gallardo-Alvarado, J.; Tinajero-Campo, J. H.; Sánchez-Rodríguez, Á. (Universitat Politècnica de València, 2020-12-23)[EN] This paper addresses the kinematic analysis of a redundant parallel manipulator with a configurable platform equipped with two end-effectors. The closure equations of the position analysis generate a system of quadratic ... -
Sanahuja, G.; Valera Fernández, Ángel; Sánchez Salmerón, Antonio José; Ricolfe Viala, Carlos; Vallés Miquel, Marina; Marin Paniagua, Leonardo Jose (Elsevier España (Elsevier Doyma), 2011)[ES] Desde el punto de vista de la robótica móvil, la visión artificial juega un papel muy importante para obtener información global del entorno imprescindible para, por ejemplo, la generación automática de trayectorias ...
-
 Oliver Chiva, Ernesto (Universitat Politècnica de València, 2018-04-12)[ES] Se puede considerar que un robot paralelo es una plataforma móvil conectada a una base fija por medio de varias cadenas cinemáticas. Este tipo de robots tienen unas ventajas muy claras respecto de los robots de cadena ...
Oliver Chiva, Ernesto (Universitat Politècnica de València, 2018-04-12)[ES] Se puede considerar que un robot paralelo es una plataforma móvil conectada a una base fija por medio de varias cadenas cinemáticas. Este tipo de robots tienen unas ventajas muy claras respecto de los robots de cadena ... -
Calvo Errando, Carlos (Universitat Politècnica de València, 2017-10-25)[ES] El presente TFM trata los problemas de producción de una empresa de vendajes sanitarios en la provincia de Valencia. Partiendo de una situación inicial donde se encontraban como principales ...
-
Benavent Segovia, Miquel (Universitat Politècnica de València, 2021-02-17)[ES] En el presente Trabajo de Final de Máster se propone el desarrollo y la implementación de una solución para el control dimensional de un modo automático, fiable, preciso, cómodo y aplicable a cualquier pieza producida ...
-
 Alvarez Coronel, Juan Felipe (Universitat Politècnica de València, 2019-04-01)[ES] El alumno desarrollará el procesamiento de imagen necesario para que un sistema robotizado equipado con una cámara de visión realice una tarea de montaje de piezas de distintos tipos. También deberá programar los ...
Alvarez Coronel, Juan Felipe (Universitat Politècnica de València, 2019-04-01)[ES] El alumno desarrollará el procesamiento de imagen necesario para que un sistema robotizado equipado con una cámara de visión realice una tarea de montaje de piezas de distintos tipos. También deberá programar los ... -
 ESTUDI I MODELAT D'UNA PLATAFORMA ROBÒTICA TIPUS EXOSQUELET. CONTROL AUTOMÀTIC DEL PES DEL PACIENT Martínez Beseler, Xavier (Universitat Politècnica de València, 2015-09-24)[ES] En el presente trabajo final de grado se propone trabajar con una plataforma robótica tipo exosqueleto. La plataforma está compuesta por dos actuadores (un motor eléctrico y uno hidráulico) y tres sensores: una célula ...
ESTUDI I MODELAT D'UNA PLATAFORMA ROBÒTICA TIPUS EXOSQUELET. CONTROL AUTOMÀTIC DEL PES DEL PACIENT Martínez Beseler, Xavier (Universitat Politècnica de València, 2015-09-24)[ES] En el presente trabajo final de grado se propone trabajar con una plataforma robótica tipo exosqueleto. La plataforma está compuesta por dos actuadores (un motor eléctrico y uno hidráulico) y tres sensores: una célula ... -
 Plaza Cano, María del Mar (Universitat Politècnica de València, 2021-10-13)[ES] Los sistemas RTL (Real Time Location) han permitido hasta el momento el desarrollo de aplicaciones de localización basadas en señales de radiofrecuencia con precisión suficientemente aceptable para la localización, ...
Plaza Cano, María del Mar (Universitat Politècnica de València, 2021-10-13)[ES] Los sistemas RTL (Real Time Location) han permitido hasta el momento el desarrollo de aplicaciones de localización basadas en señales de radiofrecuencia con precisión suficientemente aceptable para la localización, ... -
 Rosillo, N.; Valera Fernández, Ángel; Benimeli Andreu, Francesc Xavier; Mata Amela, Vicente; Valero Chuliá, Francisco José (Universitat Politècnica de València, 2010-04-09)[ES] Este trabajo presenta el desarrollo y la validación de una metodología que permite el modelado y la identificación de los parámetros dinámicos de robots manipuladores. La ecuación dinámica del robot está basada en la ...
Rosillo, N.; Valera Fernández, Ángel; Benimeli Andreu, Francesc Xavier; Mata Amela, Vicente; Valero Chuliá, Francisco José (Universitat Politècnica de València, 2010-04-09)[ES] Este trabajo presenta el desarrollo y la validación de una metodología que permite el modelado y la identificación de los parámetros dinámicos de robots manipuladores. La ecuación dinámica del robot está basada en la ... -
 Mellado Arteche, Martín (Universitat Politècnica de València, 2015-10-28)[EN] The efficiency of free-collision motion planning results very sensible on robot and obstacle modelling technique selected. In this way, many works have been oriented to define models with proper throughput to speed ...
Mellado Arteche, Martín (Universitat Politècnica de València, 2015-10-28)[EN] The efficiency of free-collision motion planning results very sensible on robot and obstacle modelling technique selected. In this way, many works have been oriented to define models with proper throughput to speed ... -
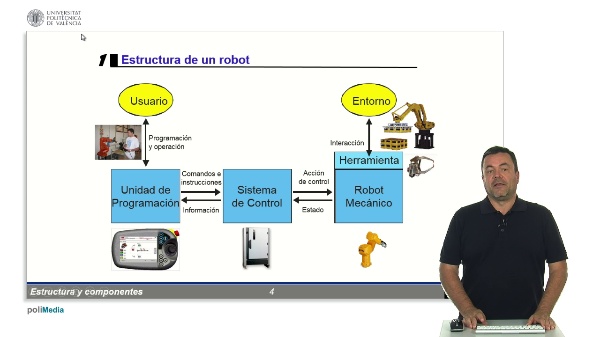 Mellado Arteche, Martín (Universitat Politècnica de València, 2016-06-28)En este video docente se presenta la estructura funcional de un robot con sus componentes más significativos
Mellado Arteche, Martín (Universitat Politècnica de València, 2016-06-28)En este video docente se presenta la estructura funcional de un robot con sus componentes más significativos -
 Guzmán Giménez, José (Universitat Politècnica de València, 2022-03-03)[ES] Uno de los elementos más importantes en el sistema de control de un robot es su Modelo Cinemático Inverso (IKM, por sus siglas en inglés), el cual calcula las referencias de posición y velocidad requeridas para que ...
Guzmán Giménez, José (Universitat Politècnica de València, 2022-03-03)[ES] Uno de los elementos más importantes en el sistema de control de un robot es su Modelo Cinemático Inverso (IKM, por sus siglas en inglés), el cual calcula las referencias de posición y velocidad requeridas para que ...
Mostrando ítems 1-13 de 13

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
