


Listar por autor "Gracia Calandin, Luis Ignacio"
RiuNet: Repositorio Institucional de la Universidad Politécnica de Valencia
- RiuNet repositorio UPV
- :
- Listar por autor
JavaScript is disabled for your browser. Some features of this site may not work without it.
Buscar en RiuNet
Listar
Mi cuenta
Ayuda RiuNet
Admin. UPV
Listar por autor "Gracia Calandin, Luis Ignacio"
Mostrando ítems 1-20 de 94
-
 Gracia Calandin, Carlos Pablo; Andrés Romano, Carlos; Gracia Calandin, Luis Ignacio (Springer Verlag (Germany), 2013-04)This work presents a hybrid approach based on the use of genetic algorithms to solve efficiently the problem of cutting structural beams arising in a local metalwork company. The problem belongs to the class of one-dimensional ...
Gracia Calandin, Carlos Pablo; Andrés Romano, Carlos; Gracia Calandin, Luis Ignacio (Springer Verlag (Germany), 2013-04)This work presents a hybrid approach based on the use of genetic algorithms to solve efficiently the problem of cutting structural beams arising in a local metalwork company. The problem belongs to the class of one-dimensional ... -
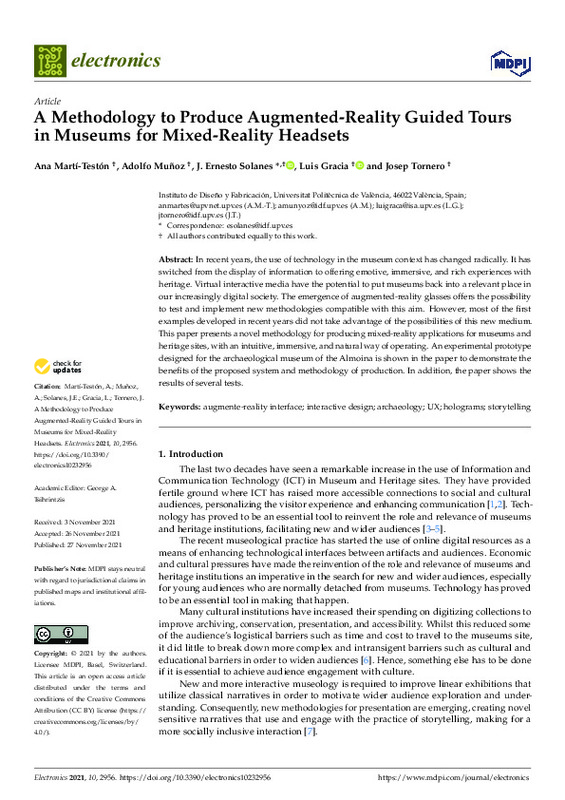 Martí-Testón, Ana; Muñoz García, Adolfo; Solanes Galbis, Juan Ernesto; Gracia Calandin, Luis Ignacio; Tornero Montserrat, Josep (MDPI AG, 2021-12)[EN] In recent years, the use of technology in the museum context has changed radically. It has switched from the display of information to offering emotive, immersive, and rich experiences with heritage. Virtual interactive ...
Martí-Testón, Ana; Muñoz García, Adolfo; Solanes Galbis, Juan Ernesto; Gracia Calandin, Luis Ignacio; Tornero Montserrat, Josep (MDPI AG, 2021-12)[EN] In recent years, the use of technology in the museum context has changed radically. It has switched from the display of information to offering emotive, immersive, and rich experiences with heritage. Virtual interactive ... -
 Gracia Calandin, Luis Ignacio; Sala, Antonio; Garelli, Fabricio (Elsevier, 2012-06)This work presents a sliding-mode method for robotic path conditioning. The proposal includes a trap avoidance algorithm in order to escape from trap situations, which are analogous to local minima in potential field-based ...
Gracia Calandin, Luis Ignacio; Sala, Antonio; Garelli, Fabricio (Elsevier, 2012-06)This work presents a sliding-mode method for robotic path conditioning. The proposal includes a trap avoidance algorithm in order to escape from trap situations, which are analogous to local minima in potential field-based ... -
 Gracia Calandin, Luis Ignacio; Sala, Antonio; Garelli, Fabricio (Elsevier, 2012-01)An approach based on geometric invariance and sliding mode ideas is proposed for redundancy resolution in robotic systems to fulfill configuration and workspace constraints caused by robot mechanical limits, collision ...
Gracia Calandin, Luis Ignacio; Sala, Antonio; Garelli, Fabricio (Elsevier, 2012-01)An approach based on geometric invariance and sliding mode ideas is proposed for redundancy resolution in robotic systems to fulfill configuration and workspace constraints caused by robot mechanical limits, collision ... -
 A ZigBee-based wireless system for monitoring vital signs in hyperbaric chambers: Technical report Carmona, Cristian; Alorda, Bartomeu; Gracia Calandin, Luis Ignacio; Perez Vidal, Carlos; Salinas, Antonio (Undersea and Hyperbaric Medical Society (UHMS), 2017)[EN] This paper presents a wireless ZigBee-based system to replace the traditional wired communication link of the hyperbaric chambers, which allows reducing the costs of seals capable of withstanding the internal pressures ...
A ZigBee-based wireless system for monitoring vital signs in hyperbaric chambers: Technical report Carmona, Cristian; Alorda, Bartomeu; Gracia Calandin, Luis Ignacio; Perez Vidal, Carlos; Salinas, Antonio (Undersea and Hyperbaric Medical Society (UHMS), 2017)[EN] This paper presents a wireless ZigBee-based system to replace the traditional wired communication link of the hyperbaric chambers, which allows reducing the costs of seals capable of withstanding the internal pressures ... -
 Solanes Galbis, Juan Ernesto; Gracia Calandin, Luis Ignacio; Muñoz-Benavent, Pau; Esparza Peidro, Alicia; Valls Miro, Jaime; Tornero Montserrat, Josep (Elsevier, 2018-12)[EN] This work presents a hybrid position/force control of robots for surface contact conditioning tasks such as polishing, profiling, deburring, etc. The robot force control is designed using sliding mode ideas to benefit ...
Solanes Galbis, Juan Ernesto; Gracia Calandin, Luis Ignacio; Muñoz-Benavent, Pau; Esparza Peidro, Alicia; Valls Miro, Jaime; Tornero Montserrat, Josep (Elsevier, 2018-12)[EN] This work presents a hybrid position/force control of robots for surface contact conditioning tasks such as polishing, profiling, deburring, etc. The robot force control is designed using sliding mode ideas to benefit ... -
 Gracia Calandin, Luis Ignacio; Solanes Galbis, Juan Ernesto; Muñoz-Benavent, Pau; Valls Miro, Jaime; Perez-Vidal, Carlos; Tornero Montserrat, Josep (Elsevier, 2018-06)[EN] This work presents a hybrid position-force control of robots in order to apply surface treatments such as polishing, grinding, finishing, deburring, etc. The robot force control is designed using sliding mode concepts ...
Gracia Calandin, Luis Ignacio; Solanes Galbis, Juan Ernesto; Muñoz-Benavent, Pau; Valls Miro, Jaime; Perez-Vidal, Carlos; Tornero Montserrat, Josep (Elsevier, 2018-06)[EN] This work presents a hybrid position-force control of robots in order to apply surface treatments such as polishing, grinding, finishing, deburring, etc. The robot force control is designed using sliding mode concepts ... -
 Gracia Calandin, Luis Ignacio; Perez-Vidal, Carlos; Valls-Miro, Jaime (Hindawi Limited, 2018)
Gracia Calandin, Luis Ignacio; Perez-Vidal, Carlos; Valls-Miro, Jaime (Hindawi Limited, 2018) -
 González, Claudia; Solanes Galbis, Juan Ernesto; Muñoz García, Adolfo; Gracia Calandin, Luis Ignacio; Girbés-Juan, Vicent; Tornero Montserrat, Josep (Elsevier, 2021-04)[EN] There are some industrial tasks that are still mainly performed manually by human workers due to their complexity, which is the case of surface treatment operations (such as sanding, deburring, finishing, grinding, ...
González, Claudia; Solanes Galbis, Juan Ernesto; Muñoz García, Adolfo; Gracia Calandin, Luis Ignacio; Girbés-Juan, Vicent; Tornero Montserrat, Josep (Elsevier, 2021-04)[EN] There are some industrial tasks that are still mainly performed manually by human workers due to their complexity, which is the case of surface treatment operations (such as sanding, deburring, finishing, grinding, ... -
González Álvarez, Elena (Universitat Politècnica de València, 2018-09-17)[ES] El presente TFG recoge el análisis y mejora de la logística interna de la planta Istobal Manufacturing, en la que se detecta una baja calidad del servicio al cliente y a Línea de Montaje debido a errores del ...
-
Pardo Ortiz, Adrián (Universitat Politècnica de València, 2018-09-17)[ES] El presente Trabajo Fin de Grado surge a partir de la realización de unas prácticas en empresa por un periodo de 5 meses en la cadena de restaurantes La Parrilla de Pollos Planes. Este documento recopila las ...
-
Pons Vañó, Luisa María (Universitat Politècnica de València, 2018-09-17)El TFG describirá la empresa, su organigrama, su sistema productivo y logístico. La alumna analizará la situación inicial de la empresa e identificará la problemática en los procesos de trabajo en el área de fabricación y ...
-
 Fabra, Lidia; Solanes, J. Ernesto; Muñoz García, Adolfo; Martí Testón, Ana; Alabau, Alba; Gracia Calandin, Luis Ignacio (MDPI AG, 2024-03)[EN] This study explores the utilization of Neural Radiance Fields (NeRFs), with a specific focus on the Instant NeRFs technique. The objective is to represent three-dimensional (3D) models within the context of the ...
Fabra, Lidia; Solanes, J. Ernesto; Muñoz García, Adolfo; Martí Testón, Ana; Alabau, Alba; Gracia Calandin, Luis Ignacio (MDPI AG, 2024-03)[EN] This study explores the utilization of Neural Radiance Fields (NeRFs), with a specific focus on the Instant NeRFs technique. The objective is to represent three-dimensional (3D) models within the context of the ... -
 García-Fernández, Alberto; Solanes, J. Ernesto; Muñoz García, Adolfo; Gracia Calandin, Luis Ignacio; Tornero Montserrat, Josep (MDPI AG, 2022-05)[EN] Teleoperation of bimanual robots is being used to carry out complex tasks such as surgeries in medicine. Despite the technological advances, current interfaces are not natural to the users, who spend long periods of ...
García-Fernández, Alberto; Solanes, J. Ernesto; Muñoz García, Adolfo; Gracia Calandin, Luis Ignacio; Tornero Montserrat, Josep (MDPI AG, 2022-05)[EN] Teleoperation of bimanual robots is being used to carry out complex tasks such as surgeries in medicine. Despite the technological advances, current interfaces are not natural to the users, who spend long periods of ... -
 Gracia Calandin, Luis Ignacio; Andrés de la Esperanza, Francisco Javier; Gracia Calandin, Carlos Pablo (In-Tech, 2012)[EN] The present paper explores the industrial capabilities of a CAM¿]ROB system implementation based on a commercial CAD/CAM system (NXTM) for an industrial robotic workcell of eight joints, committed to the rapid prototyping ...
Gracia Calandin, Luis Ignacio; Andrés de la Esperanza, Francisco Javier; Gracia Calandin, Carlos Pablo (In-Tech, 2012)[EN] The present paper explores the industrial capabilities of a CAM¿]ROB system implementation based on a commercial CAD/CAM system (NXTM) for an industrial robotic workcell of eight joints, committed to the rapid prototyping ... -
 Perez-Vidal, C.; Gracia, L.; de Paco, J.M.; Wirkus, M.; Azorin, J.M.; de Gea, J. (Taylor & Francis, 2018)[EN] This work presents a robotic-based solution devised to automate the product packaging in industrial environments. Although the proposed approach is illustrated for the case of the shoe industry, it applies to many ...
Perez-Vidal, C.; Gracia, L.; de Paco, J.M.; Wirkus, M.; Azorin, J.M.; de Gea, J. (Taylor & Francis, 2018)[EN] This work presents a robotic-based solution devised to automate the product packaging in industrial environments. Although the proposed approach is illustrated for the case of the shoe industry, it applies to many ... -
 García-Fernández, Alberto; Solanes, J. Ernesto; Gracia Calandin, Luis Ignacio; Muñoz-Benavent, Pau; Girbés-Juan, Vicent; Tornero, Josep (Taylor & Francis, 2022-01-02)[EN] This work develops a method to perform surface treatment tasks using a bimanual robotic system, i.e. two robot arms cooperatively performing the task. In particular, one robot arm holds the work-piece while the other ...
García-Fernández, Alberto; Solanes, J. Ernesto; Gracia Calandin, Luis Ignacio; Muñoz-Benavent, Pau; Girbés-Juan, Vicent; Tornero, Josep (Taylor & Francis, 2022-01-02)[EN] This work develops a method to perform surface treatment tasks using a bimanual robotic system, i.e. two robot arms cooperatively performing the task. In particular, one robot arm holds the work-piece while the other ... -
 Andrés de la Esperanza, Francisco Javier; Gracia Calandin, Luis Ignacio; Tornero Montserrat, Josep (Taylor & Francis, 2011-06)This article deals with the tuning of a complex robotic workcell of eight joints devoted to milling tasks. It consists of a KUKA (TM) manipulator mounted on a linear track and synchronised with a rotary table. Prior to any ...
Andrés de la Esperanza, Francisco Javier; Gracia Calandin, Luis Ignacio; Tornero Montserrat, Josep (Taylor & Francis, 2011-06)This article deals with the tuning of a complex robotic workcell of eight joints devoted to milling tasks. It consists of a KUKA (TM) manipulator mounted on a linear track and synchronised with a rotary table. Prior to any ... -
 Andrés de la Esperanza, Francisco Javier; Gracia Calandin, Luis Ignacio; Tornero Montserrat, Josep (Springer Verlag (Germany), 2012-09)This work highlights the applicability of different redundancy resolution schemes to the postprocessing stage from a computer-aided manufacturing (CAM) system to an industrial redundant workcell. The inverse kinematic ...
Andrés de la Esperanza, Francisco Javier; Gracia Calandin, Luis Ignacio; Tornero Montserrat, Josep (Springer Verlag (Germany), 2012-09)This work highlights the applicability of different redundancy resolution schemes to the postprocessing stage from a computer-aided manufacturing (CAM) system to an industrial redundant workcell. The inverse kinematic ... -
 Muñoz García, Adolfo; Martí Testón, Ana; Mahiques, Xavier; Gracia Calandin, Luis Ignacio; Solanes Galbis, Juan Ernesto; Tornero Montserrat, Josep (Elsevier, 2020-01)[EN] This research develops a new mixed reality-based worker interface for industrial camera 3D positioning, which is intuitive and easy to manage, in order to enhance the worker safety, ergonomics and productivity. An ...
Muñoz García, Adolfo; Martí Testón, Ana; Mahiques, Xavier; Gracia Calandin, Luis Ignacio; Solanes Galbis, Juan Ernesto; Tornero Montserrat, Josep (Elsevier, 2020-01)[EN] This research develops a new mixed reality-based worker interface for industrial camera 3D positioning, which is intuitive and easy to manage, in order to enhance the worker safety, ergonomics and productivity. An ...
Mostrando ítems 1-20 de 94

Universitat Politècnica de València. Unidad de Documentación Científica de la Biblioteca (+34) 96 387 70 85 · RiuNet@bib.upv.es
El contenido de este sitio está bajo una licencia Creative Commons Reconocimiento – No Comercial – Sin Obra Derivada (by-nc-nd), salvo que se indique lo contrario.
Los metadatos de este sitio están bajo una licencia Dominio Público.
